ちょっと Tea Time!? 球出し機を考えてみる!の巻き。 2023.10.27
#オーディオネタではありませんので、悪しからず。
ことのはじまり
単身赴任からもどってきて、私の運動不足に懸念を感じた妻に、テニスの体験クラスに連行された。
でも、ラケットを振ってみると意外と面白い。単に走ったりするのは好きではないが、ゲーム性のある
スポーツって面白いです。
ただ、テニススクールって1クラスあたりの人も結構多いし、待ち時間もあり、四六時中ボールを
打っているいるというわけではありません。まあ、それでも適度に汗をかくし、運動にはもってこいでしょう。
スクールに行くときのウエアはすべて妻が用意してくれます。私的には短パンとTシャツで
いいような気がしますが、変な服装をして行くのが嫌らしくて、それなりの恰好になります。
で、新しいウエアが必要になったみたいで(単に妻の買い物好き?)、梅田のテニスショップに連行されました。
で、そのときに一人でもテニス練習できるような球出し機なるものが置いてあって、俄然興味がわきました。
これがあれば、ちょっと公園で練習もできそうだし、なにやらオモチャっぽくて楽しそうです。
ただ、値段をみると最小構成でも10万円程度で、必要なものを一式そろえると20万円くらいになりそうです。
こりゃ、エンジニアの端くれとして、DIYで作ってみるかな!というのが、このTea
Time!? のきっかけです。

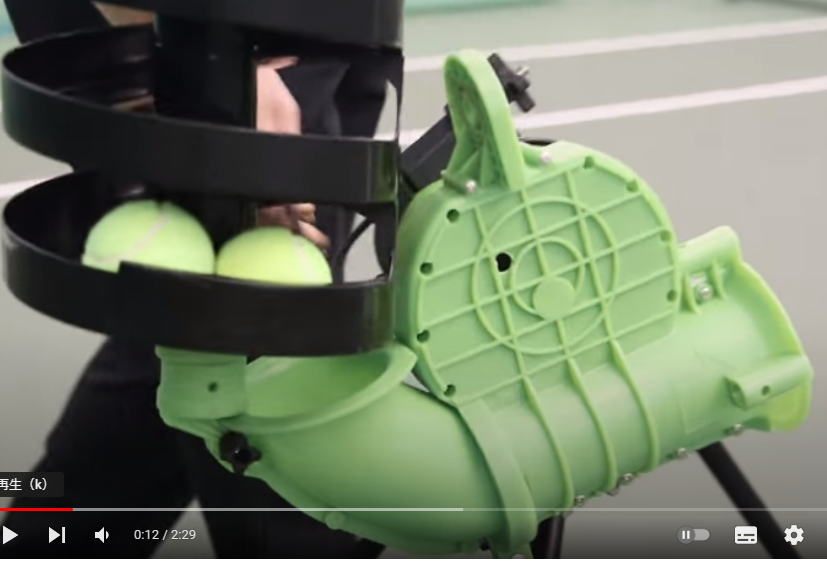
こんなものがあるのですね。テニスのボール出し機です。
ネットを探すと色々とあるなあ〜
10万円となると、おいそれと出費はできませんが、AMAZONをみるとかなり廉価なものもあるようです。
方式的にはレバーで玉をだすものと、回転ローラで玉を射出するものの2通りにわかれるようです。
流石に電磁ソレノイドやコイルガンなどの電磁力をつかったものはないなあ〜(笑。
なかでもレバー式のものはかなり廉価です。ただ、評価をみるとかなり微妙な感じもしますし、
動画をみていても手での球出し程度の速度になるようで、ボレーの練習などにはすこし辛いものがあります。
主流はローラ回転式で、かなりボールを早くかつ遠くまで飛ばせるようです。ただ、お値段的はやはり高いです。
でも、どうせつくるなら実際につかえるレベルのものにしたいなあ〜。
ということで、回転ローラ式で検討してみましょう!


レバー式は廉価だが機能は??? 回転ローラ式はやはり高いです.
使えそうな部品を物色
さて、回転ローラ式に決めたのはいいのだけど、それを構成する最重要パーツが準備できるかどうが
問題です。さっそくAMAZONで色々としらべましたが、あまり候補はなさそうです。
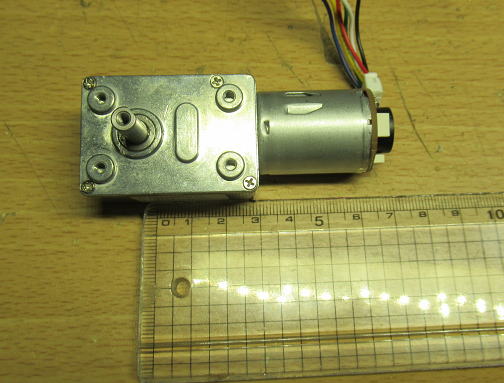
そのなかでも、使えそうなモータは下記になります。
DCモータで24Vで回せば7000rpmまで回るみたいです。7000rpmでまわせば直径100mmの
ロータの周速は時速130kmにも達します。もっともそんな速度で送り出せるわけもなく、
その1/3でも、でれば十分でしょう。
それとこのモータを選択した理由は軸先端にネジがついていて、また軸にもピン穴がありますので、
ロータを固定しやすそうだったからです。
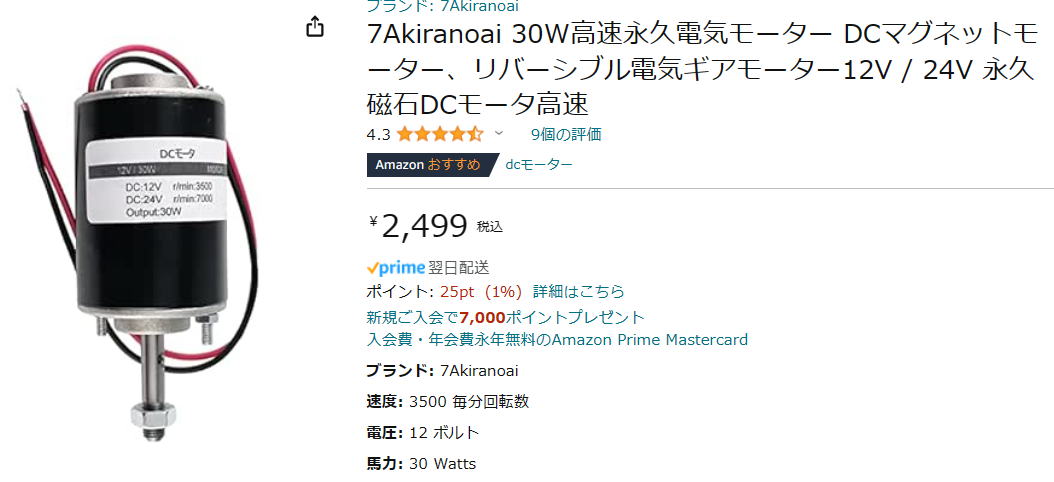
とりあえずモータはこれがつかえるかもです。24Vで動かせば7000rpmで動くみたいです(勿論無負荷ですが)。
ロータにつかうタイヤ(?)については、直径100mm程度のものならキャスターがつかえるかもしれません。
そのなかでも、タイヤの軸にベアリングが入っていないタイプのものがあればモータ軸に固定できそうなので、
そういったものを物色です。で、みつけました。ベアリングが無いためか、価格的にも案外安いです.
心配なのは、タイヤの軸の内径が判らない点です。まあ、細ければ穴をあければいいし、穴が大きければ、モータ軸になにか
巻物でもしましょう。

ローラ部分はこのタイヤを試してみましょう!
とりあえず一組だけ購入しましょう
モータとロータタイヤが組み合わさるかが心配なので、とりあえず1個づつの購入にしておきましょう。
本体はロータは上下に2個必要ほしいところなので、2組を購入すべきですが、うまくモータとロータが
結合できなければ無駄になってしまいます。
一応保険として、回転ローラ式ではなくてレバー式の球出し機も検討できるように、
できだけトルクが大きくて、低速で回転できるギアモータも購入しておきました。

レバー式の球出し機も検討できるように、保険としてこのモータも購入です。
うまく結合できるかな?
さて、夜更けに注文して次の日には到着です。AMAZONさんの物流は流石ですね。
時間差でキャスターも届きました。

モータ類が届いていました。

こちらも届きました。
キャスタの軸はカシメで留めてあるので、グラインダで削り落として軸を抜きます。
軸の直径をみるとモータと同じ8mmのようです.これはラッキーです。
軸直径が8mmなので、ロータの軸内径もほぼ8mmですからぴったし。
ベアリングはないので、8mmよりすこし大きいのですが、モータとの軸がガタつくほどで
はないので、モータ軸の加工も不要でしょう。

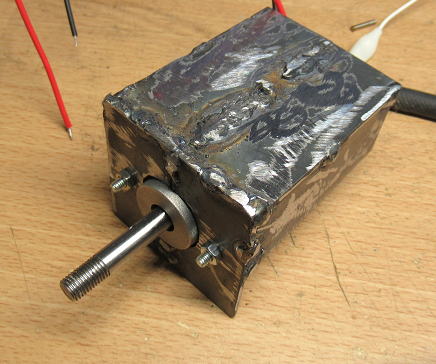
モータ軸とロータ軸内径はほぼ同じで、ラッキーにもすっぽりはまりました。
こうなると俄然やる気がでてきます。ロータ側はプラスチックなので、
留めピンが入る溝の加工も簡単です。でも、ちょっと心配なのは、回転時の
力はほぼこのピンで吸収することになるので、耐久性は大丈夫かなあ〜といったところです。
まあ、こわれても消耗品としては安いものです。というか、壊れる頃には
飽きてしまっているほうの確率が高いです(笑。
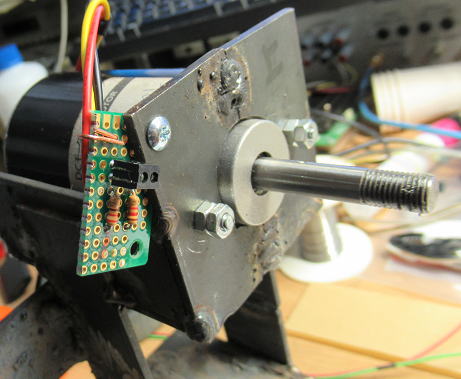
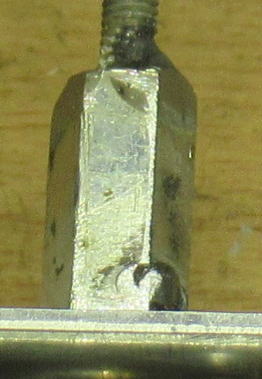
さて、ロータ側の留めピンの溝加工と、モータ軸のネジ止部の加工をすこしおこなって
モータと固定です。プラスチックなので、あまり強くナットは締めずにおきましょう。

留めピン用の溝を加工です。

M3ネジを留めピン代わりにつかいます。

モータとロータの結合が完了しました。
1ロータ式もあるんだ〜
さらにネットで調べてみると、1ロータ式の球出し機もあるようです。
ということで、最初は2ロータ式ではなくて1ロータで試作してもいいかもです。
Dimension Sport The Baseliner Slam - YouTube
とりあえず、飛ぶの?
さて、モータとロータは固定できました。もちろん、モータに通電すれば勢いよくロータが回転します。
しかし、ちゃんとボールを飛ばせるのだろうか?
高速にロータが回転したとしても、ボールが噛みこんだ瞬間に回転も落ちるだろうし、おそらく
ロータの慣性力がなければ、いくら高速でまわっても飛ばないような気がします。
ただ、この実験って簡単にはおこなえないようです.というのも、ロータにボールが噛みこんだ瞬間に、
ローラがはじかれますから、かなりの力で固定しておかなければなりません。
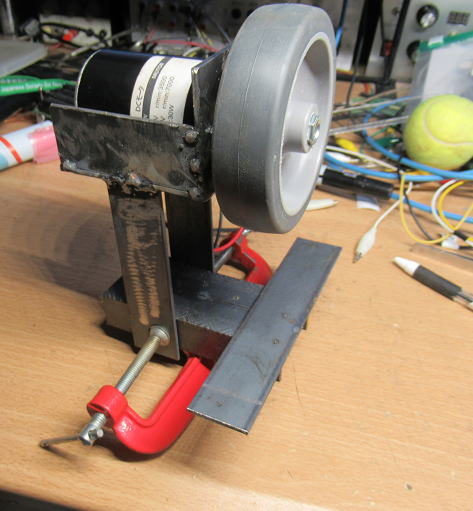
どうやればいいだろう? とりあえず適当に、机上に万力でモータを固定して、
回転するロータの間にボールそ挟み込みました。

とりあえず、ボールが飛ぶか試してみました。結果はポローンと弱弱しい。
ロータの固定がカギになりそうです。
ぽろ〜ん〜
高速でロータは回転していますが、ボールはポローンと弱く飛ばされるだけでした。
やっぱり、固定方法に難があるようです。こりゃ、すこし本格的に治具をつくって
実験する必要がありそうです。
久しぶりの溶接 2023.10.28
さて、モータをしっかりと固定するための治具作成です。とりあえず、どのような構成にするかは
頭の中で考えておいて、あとは現物あわせの採寸適当な組み立てです。
溶接で組み立てますから、切った貼ったが簡単です。
それにしても、久しぶりの溶接かなあ〜。溶接棒が湿っていないかなあ〜。

まずは一番気をつかうモータホルダーから作成です。
裏面は汚い溶接の跡でいっぱいです。
モータホルダーができれば、あとは滑り板を作成です。
ロータと滑り板の距離はどの程度にすればいいのか、まだわからないので、
Cクランプで固定です。距離が決まれば溶接する予定です。
ネジ止めのほうがいいかな?
滑り板とロータ間距離がわからないので、まずはクランプで固定です。
よくわからないなあ〜
テニスボールの直径が約67mmなので、もちろん滑り板とロータの間隔はそれ以下にする必要がありますが、
間隔が広いと力が伝わらないし、かといって間隔を狭くし過ぎるとボールが噛みこんだときに、ロータの回転が
落ちて射出速度がでません。どの距離が最適なんだろう?
で、色々と試してみましたが、よくわからなかったです(笑。どれも同じような感じです。
となると、ボールへの負荷を考えて広めの方がよさそうです。ということで、とりあえず56mmあたりが
なんとなく良さそうでした。なお、モータの回転はバッテリーの充電器(13Vくらい)をつかったので、
飛距離は6mくらいでした。もうちょっと飛ぶと思ったんだけどなあ〜。
まあ、定格一杯の24Vまで上げればもっと飛ぶでしょう。それに、このモータは30Vくらいでも大丈夫そうなので、
そうすれば15mくらいは飛ぶかな?しかし、30Vとなるとバッテリーの準備が大変です。
24Vなら12Vのバッテリー2個で済みますから、おそらくこのあたりが最大でしょう。

屋外で滑り板とロータの間隔の最適値を探りますが、よくわかりませんでした。
結局は56mmあたりが、なんとなく良さそうな感じです。
でも、モータ電圧が低いですが、それでも6m程度は飛んだので、24Vまであげれば10mくらいは飛ぶことが
期待できます。これならば、実用に耐えるでしょう。
次はボールコンテナを検討しましょう
ボールの射出については、なんとなく目途がつきそうなので、次は一定間隔にボールが射出できるように
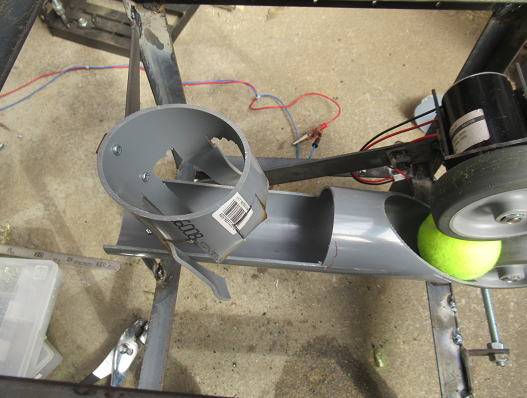
ボールコンテナを検討です。ボールコンテナも色々な方式があります。螺旋状に蓄えるものは、ボールを
入れるのが面倒そうですが、ボールを1個づつ出す方式については簡単そうです。

螺旋状にボールを蓄える方式もありますが、ボールをセットするのが面倒そう。
もう一つは、バスケットにボールをため込んで、内部で回転する円盤でボールを1個づつ供給する
方法があります。なんとなく、これがテニスの球出しでは主流のようです。
この方式だと、ボールを供給するのが簡単です。でも、回転部の作成がちょっと面倒そうです。

DIYテニスボールマシンアップグレードバージョンボールランチャー - YouTube
しまったなあ〜
運よく、円盤を回転できるような減速モータは買ってあるのですが、しまったことに
これは軸が直交してでているタイプです。そのため、円盤を下側から回そうとしたときに、
ボールの落ち込み穴がモータと干渉しないように、円盤直径を大きくしなければなりません。
おそらく、購入した減速モータをつかうとすれば、円盤直径は小さくても32cmくらいになり
そうです。バスケットの大きさを考えると最大でも30cm以下にしたいところです。
運よく減速モータも購入していましたが、軸が直交しているタイプです。
モータを新たに買いなおすことも考えられますが、ちょっと勿体ない気もします。
ということで、なんとかこのモータを使うことを考えていきましょう。

こういったタイプの減速モータを買いなおしたいところですが、やっぱり勿体ないなあ〜。
上から回転させましょう!
すでに購入したモータを活かすために、円盤は上側から回すことにします。
バスケットに上蓋あたりから軸を伸ばして回転させるか、あるいは円盤の直上に配置して
回転させるかは、悩むところです。
でも、上側から回転させるとなるテーブルを回転させるための機構が必要になります。
本来はテーブルベアリンをつかうところですが、そんなものは手元にありません。
購入してもいいのですが、折角既存のモータを活用することにしたのに、別にテーブルベアリング
を購入するのも、間抜けな話になりそうです。

円盤を保持・回転させるためのテーブルベアリングが必要ですが、新たにかうのもなんだなあ〜。
テーブルベアリングもつくっちゃえ!
こうなったら、あるものでテーブルベアリングも作成です。ちょうど、ローラをとりはずしたキャスタの残りがあります。
これを改造してテーブルベアリングにしましょう。ローラの保持柱を切り落として、新たに平板を溶接でとりつけます。
改造時のポイントは平板とベース板とが平行になるようにすることですが、1点だけを軽く溶接したのち、
変形させながら平行を出して、その後に4隅を溶接することで対応しました。まあ、すこし平行がズレている感じも
ありますが、動作には影響ないでしょう。

テーブルベアリングはこれを改造して作りましょう。

まずはローラの支柱を切り取ります。

そして、平板を溶接して、形状を整えれば出来上がりです。
具体的にボールコンテナを設計していきましょう!
話はすこしそれて
バッテリーはこれ! 2023.10.29
野外で使うことが前提なので、24V程度のバッテリーが必要です.
最初は12Vのバッテリーを2個準備しようかとおもって、秋月のサイトをみていましたが、
容量が小さくても結構高いなあ〜とブツブツ。12Vバッテリー1個だけにして、
昇圧DCDCで24Vを生成したほうがいいかな〜とブツブツ。
バッテリーに関してHPをくぐってみて、どこかで安価に購入した事例がないかをみていた
ところ、停電に備えて電動アシスト自転車のバッテリーをつかってLED照明を作成されて
要る方がおられました。
あ、そうか!電チャリのバッテリーがあるやん!
これはナイスアイデアをいただきました。
早速電圧を調べてみると38Vでています。このままでは高すぎるので、
ロータの回転はPWM制御にして、その他のモータ(ボールコンテナ用)は
手持ちの降圧DCDCとすれば使えそうです。これは、だいぶ出費が抑えられそうです。
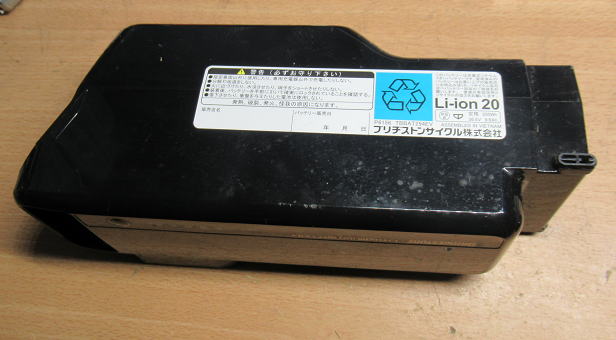
公称36.5V9.5Ahのリチウムイオンバッテリーです。

電極はこんな感じ。両端の2つが電圧出力で、真ん中の2つは充放電の制御用でしょう。
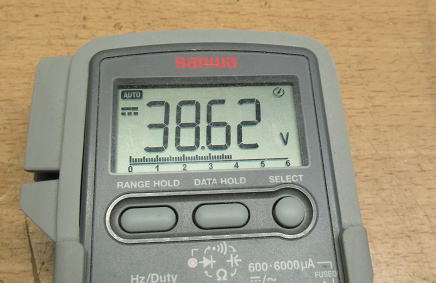
無負荷時の電圧です。
話は戻って
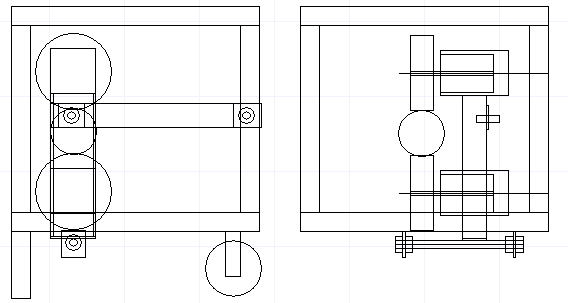
図面として必要なところはボールコンテナの円盤のところと、外枠です。
円盤については、回転支柱などと干渉しない最小寸法で製作する必要があります。
外枠については、適当でもいいのですが.最低限どの程度のサイズが必要になりそうか
を把握する必要があります.外枠のLアングルを組んでしまえば、内装については現物合わせ
でいいでしょう。 ちなみに、全体のサイズはおよその全体サイズは330x330x390mmになりそうです。
ただしボール入れ部分と、移動用のキャスターをとりつける必要もあるので、そうれば全体の高さは
650mmくらいになりそうです。
重量は鋼材が重いので、バッテリを除いて10kgくらいになりそうです。
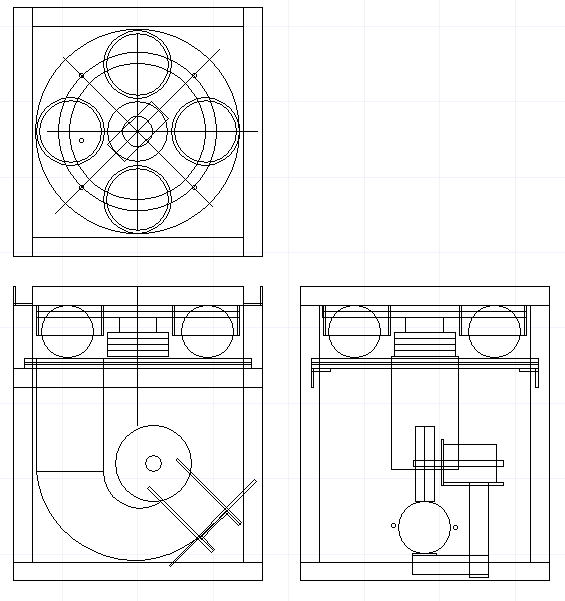
一応、三面図を書いてみて、全体の雰囲気を確認です。
もくもくと 2023.10.31
できるところから製作しましょう!

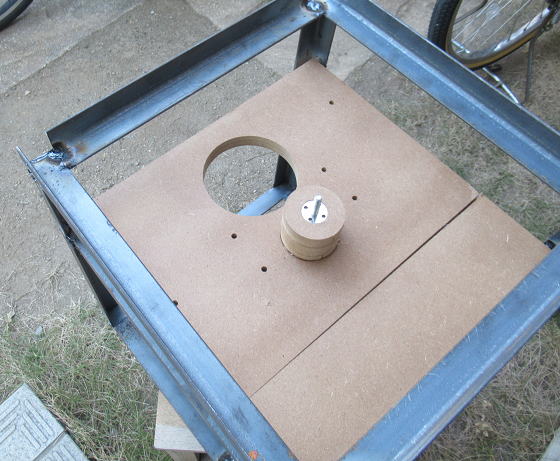
まずはフレームを溶接です。材料さえ切り出してあれば、楽しいアーク溶接です。

つでに射出機(モータ部分)を取り付けです。射出角度が変えられるようにネジで留めています。
ネジ1本で強度が足りるかどうかはやってみてのお楽しみです。
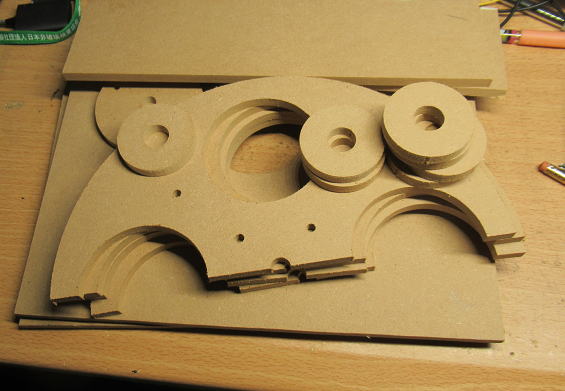
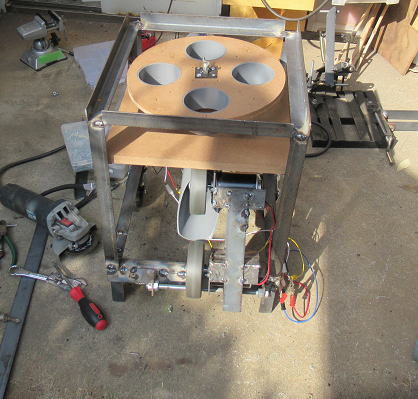
ボールコンテナ関連のMDFを切り出しです。CNCのテーブルサイズの都合上、円盤は1/2で作成して、
組み合わせて使用します。

円盤部分は合計4枚の部材を接着して作成です。接着は木工用ボンドです。
位置決めと固定のためのネジ穴がいくつかあけています。
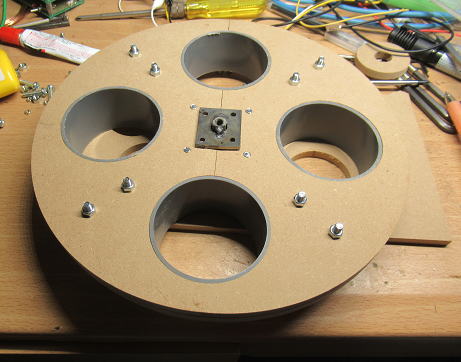
組みあがった状態です。まだ乾燥中なのでネジはついたままです。
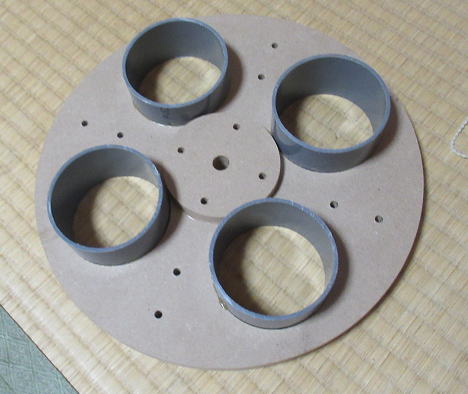
裏面はこんな感じ。ボールの入るところは塩ビ管をカットして取りつけています。
つぎはもっとも難しいところ! 2023.11.1
たぶんこの工作の中で、一番難しいところは円盤から落ちてきたボールをスムーズに射出機(回転ホイール)まで
誘導するところだと思います。
その部分は公称75mmの塩ビパイプを使って作成します。さて、うまく行くかな?
まずは、製作イメージを描いたあとは、現物合わせでの作業開始です。
まずは塩ビ管に適当に縦に割いておいて、不要な部分を切断して、割いた3本程度でガイドを作成です。
塩ビ管の材料は熱で簡単に変形するので、ガスバーナであぶってある程度温度があがったら手で曲げて
加工です。ただ、バーナのあぶり方が難しくて、やりすぎると焦がしてしまいます。かといって、炎が遠すぎると
なかなか温まりません。まあ、これも経験でしょうね。

必要な塩ビ管の長さは300mm程度です。あと、曲げ加工をする部分は線を書いておいて、そこを切断です。

途中までノコギリで切っていましたが、あまりにも大変なのでジグソーで切断です。

こんな形でガイドができました。なかなか綺麗には曲がりませんでした。

ところどころ焦がしてしまいました。
動かしてみましょう!
ここまで来ると、動かしてみたくて仕方なくなります。
ボールコンテナの円盤を取りつけて、仮配線でバッテリー充電器に射出用モータと
コンテナ円盤用のモータを駆動して、ボールを飛ばしてみます。
なお、コンテナ円盤の回転はモータを最初は上部に置こうかと思っていましたが、
軸を伸ばして下側から駆動することに変更しました。このほうが機構的にスッキリします。
ただ、回転軸が100mm程度と長くなるので、適当な材料をつかって軸受けも設けました。
コンテナ円盤の回転モータは下側に配置することにしました。こうすることで、かなりスッキリします。

軸が長くなるのて、モータフランジの金具を利用して、軸受けとしました。

コンテナの円盤が取りついた状態です。
試行!ああ、駄目だあ〜
さっそくボールを2,3個入れて飛ばしてみます。いままでは、ボールの供給を自分でやっていたこともあり、
ボールの軌跡だけをみていましたが、今回はボールの受け側にまわって跳ね具合などをチェックです。
で、何回かボールを飛ばしてみましたが、大きな問題が発覚です。
いや、1ロータでの射出機にした時点で、ある程度の想像がついていましたが、
単に目をつむっていただけだったようです。
トップスピンかかりすぎ!
そう、ボールに進行方向の回転(トップスピン)がかかり過ぎです。
ボールを直接キャッチするのも難しいくらいです。
そして、地面にバウンドしても、あまり跳ねません。こりゅあ、参ったなあ〜。
スピンがかかり過ぎるために、ボールの飛距離もあまり出なかったのでしょう。
ああ、ちょっと落胆の度合が大きくて写真撮るのも忘れてしました。
射出機を2ローラ方式に変更できるか?
とりあえず、1ロータ方式での射出機で最後まで完成させて、その後に改造を試みるかな〜
とも考えましたが、やはりこのままでは結果がダメになることが分かっていることもあり、
2ロータ方式への変更を検討です。
ただ、最大の課題がフレームサイズです。すなわち射出モータ類が収納できる、
フレームの内寸法の最大値は250mmです。しかし、ロータの径が100mmあって、
さらにボールを挟み込む間隔(56mmでいいのかな?)を加えると2ロータ式だと、
256mm必要です。これでは収まりません。 すこし、角度をつけて射出するので、
すこし必要な高さは小さくなることから、ギリギリ入りそうですが余裕がありません。
フレームのLアングルの高さ分(25mm)はなんとかプラスαの余裕ももたせられそうですが、
それでも厳しいなあ〜。
こうなったら、フレームにキャスターでもとりつけて、少々フレームの下にはみ出ても
いいようにするかな?
ちょっと、図面を書いて考えてみましょう。
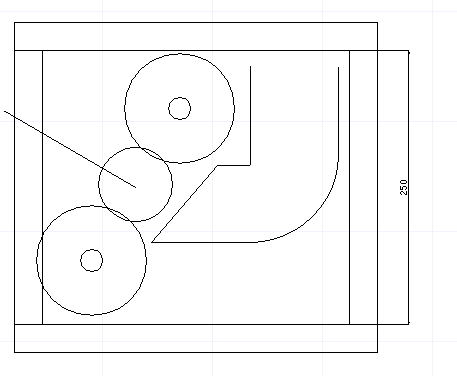
フレームの中に2ロータを入れるためには、射出角度を30度以上に
する必要がありますが、ちょっと角度大きすぎるなあ〜。
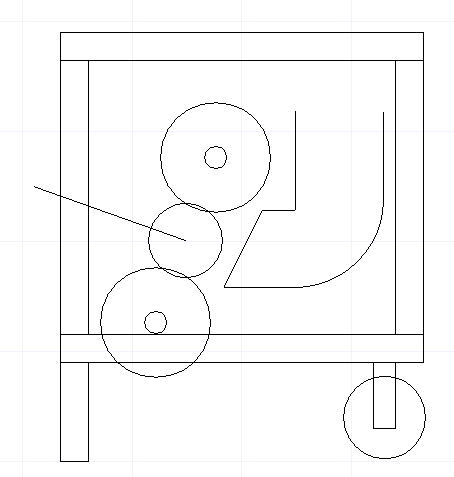
キャスターをつけて、すこしかさ上げすればだいぶ余裕ができます。
こうするしかないだろうなあ〜。
もうちょっと精度の高いイメージを
2ロータにすると寸法的な問題もあれば、その固定方式も1ロータ式にくらべて
強固にする必要があります。もうすこし、精度高くイメージをしておきましょう。
そうすれば、現物合わせでの作業効率も高くなります。
射出角度0度の場合はこんな感じだろうなあ〜。ロータの回転中心は下側にもってくると、
さすがに軸(ネジ)の固定だけで保持できるとは思えないので、支え棒も必要になるでしょう。
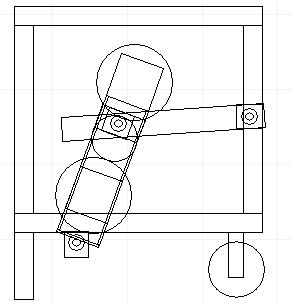
20度まで傾けたらこんな感じかな。
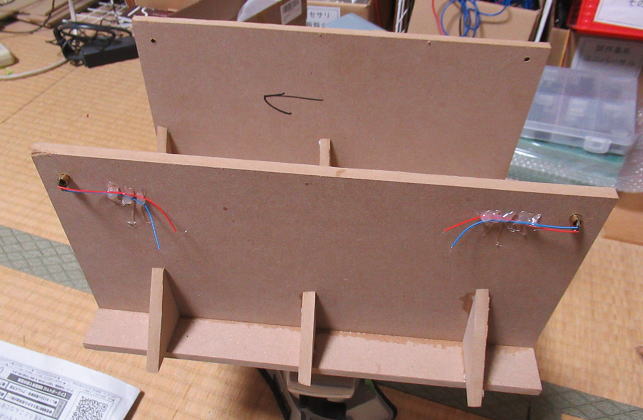
部品待ちの間に、電装系もつくりましょう 2023.11.2
2ロータ化のためモータとキャスタを発注しましたが、到着までしばらく時間があるので
今のうちに電装系を製作です。端材のアルミ板をつかってやっつけ仕事です。
なお、回路についてはあとでソフト作成も必要なので一応書いておきました。
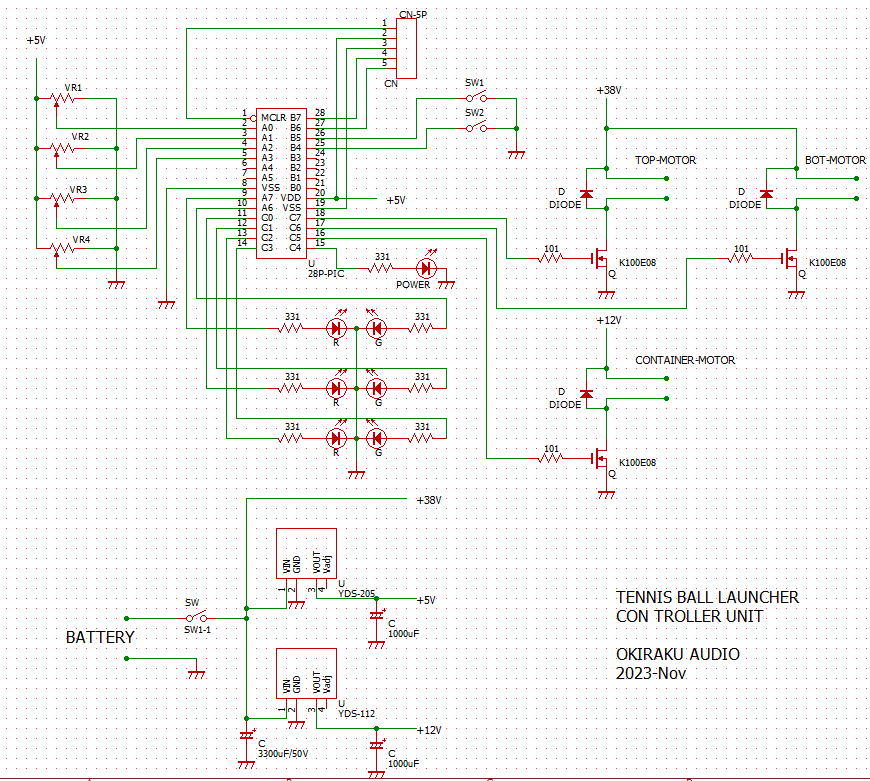
回路はいったて簡単です。ディジタル系(5V)の生成にはDCDCを使います。
なんせ、バッテリが電動アシスト自転車のものなので高電圧(38V)なので、
ドロップ方式はつかえません。同様に、ボールコンテナの動作電圧(12V)も
DCDCです。射出モータの制御は元バッテリを直接使用してPWM制御です。

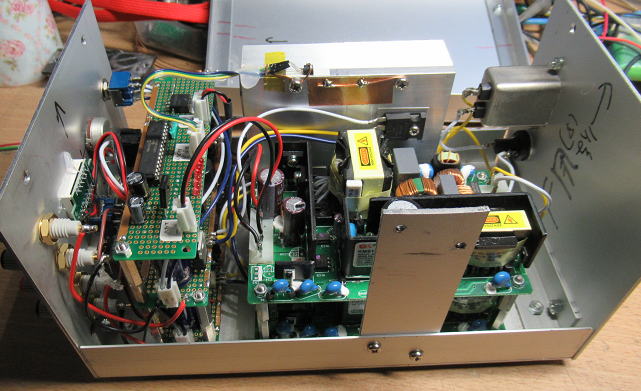
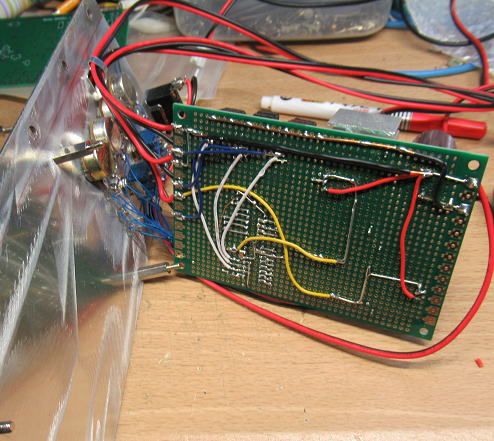
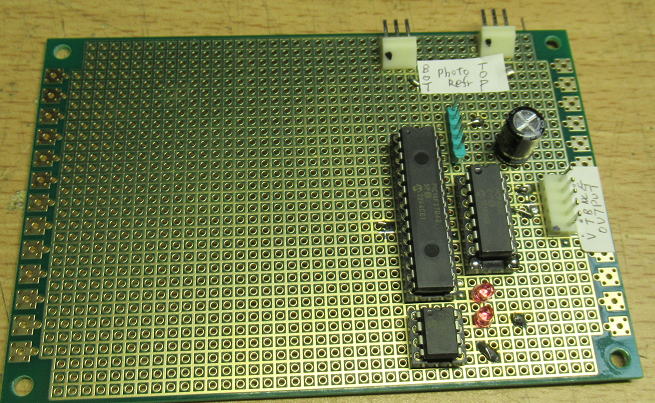
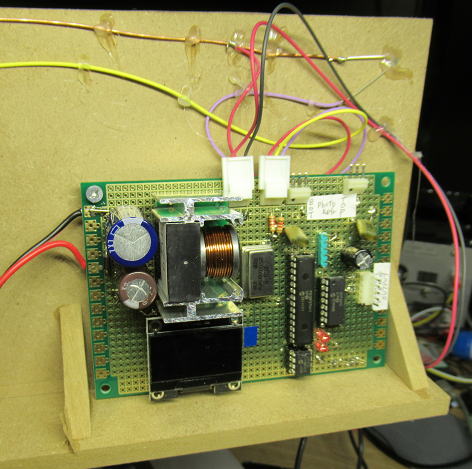
適当に必要になりそうな部品類を端材のアルミ板に取り付けです。
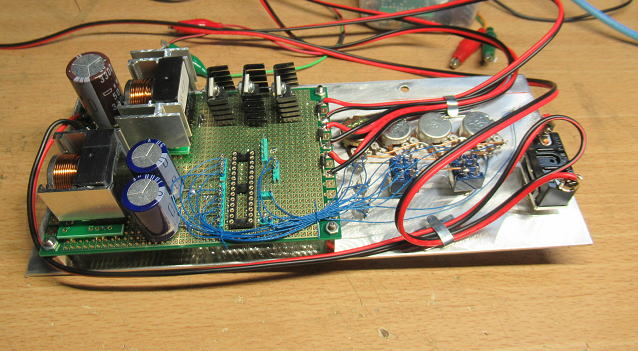
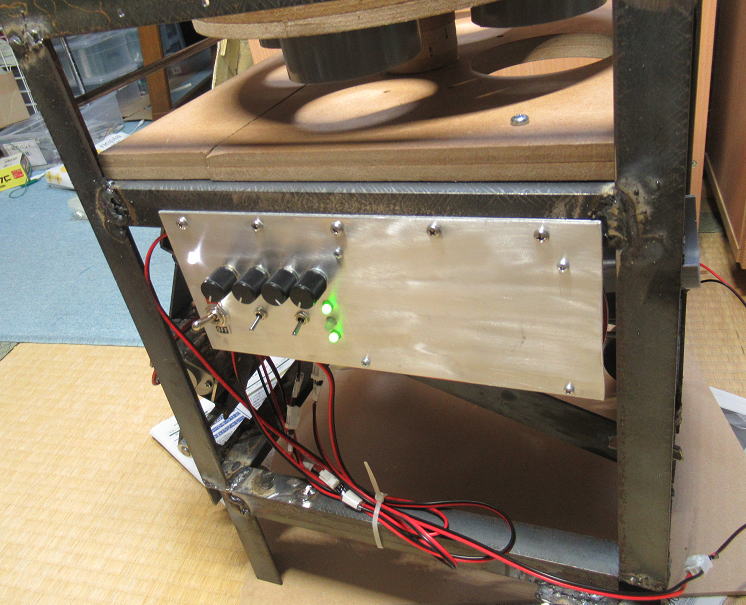
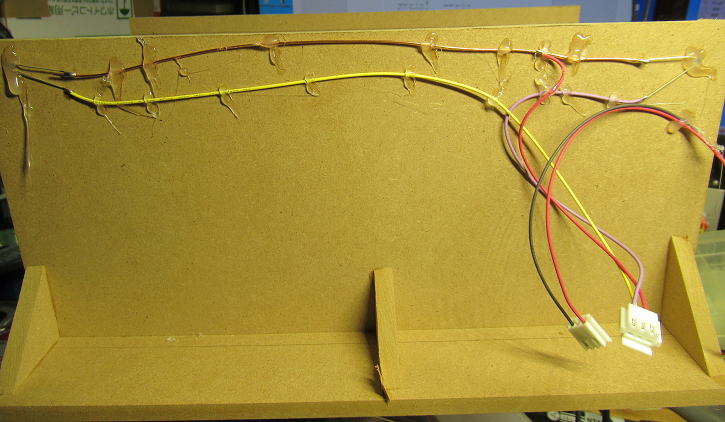
配線完了です。

表面はこんな感じです。色々な調整用にVRを4個、スイッチ2個そして、2色LEDを3個設けました。
まだ、どれをどう使おうかは決定していません(笑。
さて、ソフトって久しぶりに書くことになるけど、さいごまで書けるかなあ〜。ちょっと心配です。
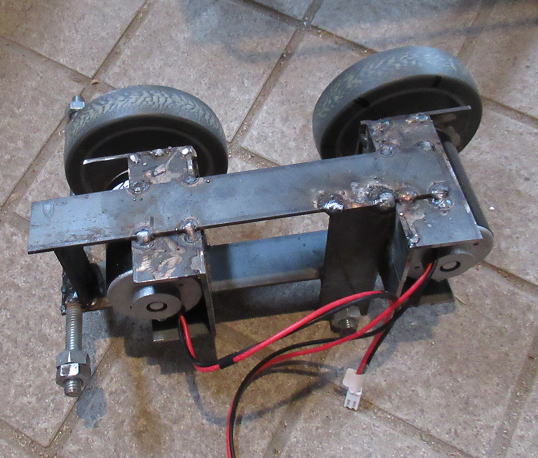
2ロータ化作成開始! 2023.11.3
ようやく部品類が届いたので、2ロータ化作成開始です。
まずはモータケースを作成して、ロータを加工してまずは実験です。
ロータの間隔をどのようにすればいいかわかりません。
まず、適当な間隔でボールを飛ばしてみますが、やはり1ロータに比べて
倍近く飛ぶようです。それとボールに書いてあるメーカ名が見えるほど、
ボールの回転もしていないようですから、やはり2ロータ化の効果があるようです。
肝心のロータ間の間隔の最適値はよくわかりませんでした。
なんせ、一度ボールを飛ばすと仮固定しているモータケースが
ズレてしまいました。ボ―ルを噛みこんだときの衝撃が大きいのでしょう。
何度かテストすると、1ロータのときと同じ間隔の56mmでも良さそうです。
もう、キリもないので、この間隔で固定して溶接で固定です。
これで諦めもつきます。

最適なロータ間隔を調べていますが、一度ボールを射出すると
Cクランプだと弱くて間が広がってしまいます。
まあ、なんとなく間隔は1ロータの時と同じ56mmで良さそうです。

間隔調整もそこそこに、もう溶接で固定してやりました。キリがないですからね〜。
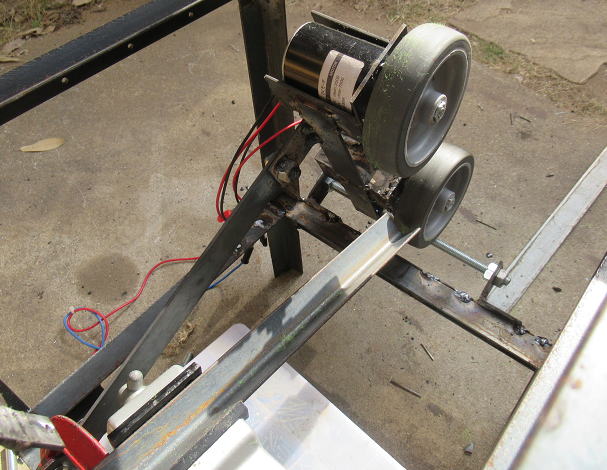
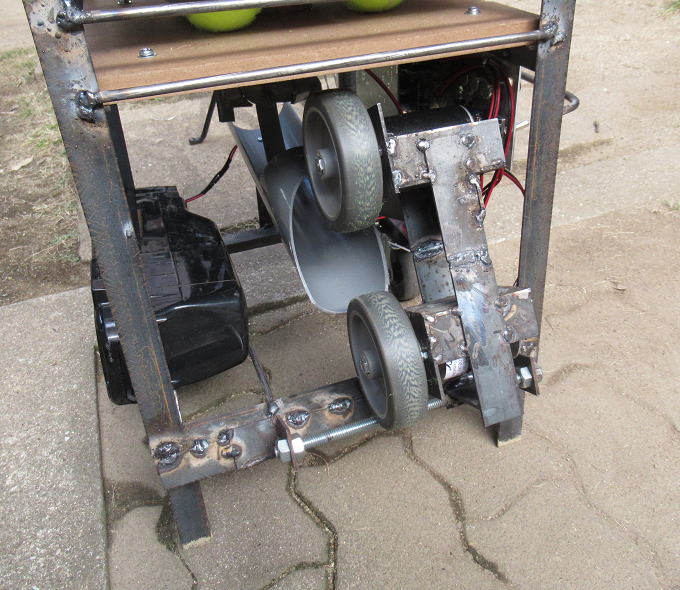
2ロータ射出機の取り付けは現物合わせで変更
作成した2ロータのボール射出機ですが、どうやってフレームに固定しようかと考えました、
最初の案ではなく、現物を眺めていたらちょっと妙案が思いつきました。
妙案というより、見てくれはすこし悪くなりますが単に簡単にできそうな方法です。
1ロータ式の取りつけに使用していた部材を切り離して、フレームの前側に着け替えです。
モータがフレームの外に一部飛び出してしまいますが、これが簡単そうです。なにより、
治具をあたらにつくらなくて済むのが助かります。
こうすることで、ロータ部分がフレームの下側にはみ出すこともなくなるのですが、
嵩上げ用にキャスターも購入していたので、ついでなので取り付けました。

1ロータ時の取り付けにつかった部材を切り離して流用です。

フレームの前側に移設です。この位置だとロータがフレームの下側に飛び出すこともないのですが、
嵩上げ用のキャスターも買ってしまったので、とりつけることにしました。

キャスターの取り付けは横着して溶接です。さほど荷重もかかりませんから、
2箇所の点付け溶接で固定です。

2ロータ射出機を仮止めした状態です。
さて、肝心の2ロータ射出機もできたことだし、主要な機構部については
連休中に完成するでしょう。
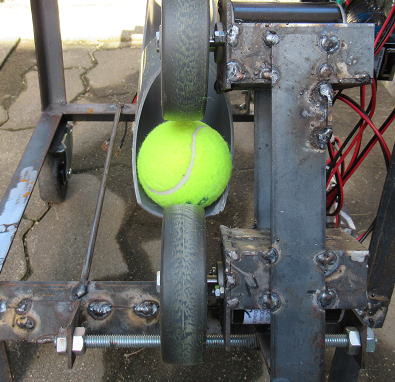
ボール誘導路検討 2023.11.4
2ロータでの射出ユニットができたので、どうやってボールを供給すればいいかを検討です。
まずは、LアングルのV字部分をつかて、どのようにボールを流すかを実験です。
結論としては、上側のローラに接しないないようにして、最初に下側ローラにボールがコンタクト
するようにボールを送り出せばいいことがわかりました。
これが判れば、あとは適当な材料で誘導路を構築するだけです。
手元に塩ビ管があったので、それを誘導路につかうことにしました。
そして、その塩ビ管にボールを落とし込むガイドを作ればいいのですが、
これは1ロータの検討時につかったものを短く切断して製作です。
これで、安定してボールをローラまで誘導できて、そしてかつ射出できるようになりました。
まずはボールの誘導路検討のためにLアングルをつかってボールの供給方法を色々と実験です。

結果的には上側ロータに接しないようにして、最初に下側ロータにコンタクトするようにすれば良いようです。
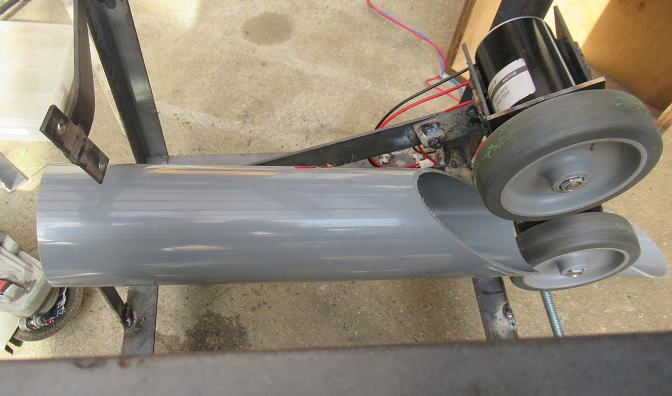
ボールのガイドは余った塩ビ管をつかいました。
ガイドの塩ビ管の途中を切り取って、ボールコンテナからのボールを受け取れるようにします。
そのため治具は1ロータ時に作成してガイドを短く切ってつかいました。

これで、ボールのガイド部分ができました。
ボールコンテナの円盤部分を加えるとこんな感じになります。
これで、何度もボールを飛ばして動作状況を確認です。
さて、これでメインとなる機構部はほど完成です。
あとは、モータコントローラの電装系を追加するだけです。
でも、これが面倒だなあ〜(笑。
電装系を取り付け! 2023.11.4
まずは電装系ですが、制御関係のソフトを作成です。ソフトといっても、モータを回すだけの簡単なソフトです。
PWM制御にしますが、すべてソフトで行います。PWM周期は1kHzにしているので、結構1kHzでの基調波が音として
聞こえてきますが、まあ野外なら気にならないでしょう。PWMのDUTYは制御盤のVRで変更可能です。
ただ、ちょっと工夫が必要だった点は、スイッチONでいきなり動き出すと、練習位置につくころにはボールが
飛び出してしまいますから、スイッチON後の5秒後にボールの射出が始まるようにしました。あとは、ボールの
射出が永遠になるのもまずいので、スイッチON後に0〜180秒MAXで停止するようにしました。
180秒というのは短いような気がしますが、180秒だと50球以上を連続で打つことになるので、
結構ハードな時間です。
リモコンという手もありますが、赤外線だと太陽光の下ではおそらく誤動作するでしょう。
電波式のリモコンがいいのですが、新たな出費になるので今回は見送りました。
電源は電チャリのバッテリーを使いますが、電極は100均の銅線を折り曲げたものをつかいました。
懸念は電源への逆接なので、万が一のことを考えてダイオードをいれて逆接対策としました。
ダイオードの分、電圧が落ちますが、もともと電チャリのバッテリー電圧が38Vあるので十分です。
なんせ、モータの定格は24Vですから。
電装系のソフトを作成して、組み込みです。

電源は電動アシスト自転車用のバッテリーです。

コネクタ代わりにこのような電極を作成してバッテリに突き刺します。
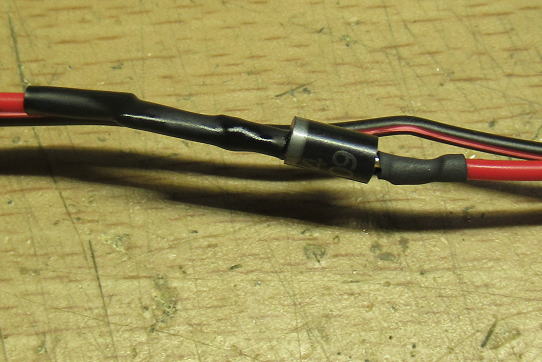
バッテリの逆接対策のために、一応ダイオードを入れておきました。400V5Aのものです。
重量は?
電装系の取り付けは、流石に屋外ではしんどいので、本体を部屋に持ち込んで作業しました。
階段をつかって、自部屋にもちこみますが、重量はさほどないような感じです。
ついでなので、重量を測ってみましたが11kgでした。ほぼ予想通りです。
だた、まだ追加する艤装もあるので、1〜2kg程度は増えるでしょう。
なんといっても、ボールの防御対策をしなければなりません。テニスボールって柔らかそうですが、
それでも当たると痛いです。ましてや、基板なんかに当たろうものなら、砕け散りそうです。
基板だけでなく、ボールが当たると不味いところが色々とあるので、直撃しないように
防御できるようにしておく必要があります。
まだまだ、実戦投入はかかりそうです。
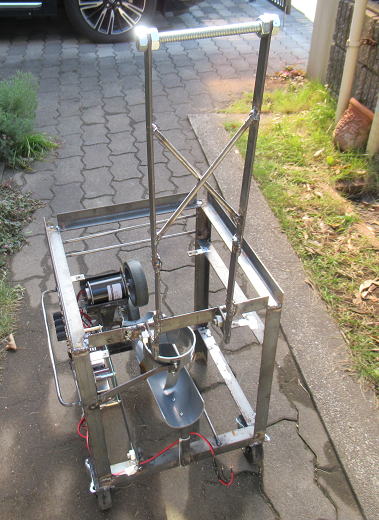
とりあえず公園で試運転・・・課題満載だあ〜 2023.11.7
とりあえず、持ち運べるように引手を取りつけて、そして100均で購入したかご(200円でした)
をボールコンテナ用に加工して、スタンドアロンで動けるような形に仕上げました。
され、これで公園に持ち込んで試運転です。

で、色々と問題があることが判明です。修正事項が一杯ありました。
・装置が横転したときに、パネルが壊れそう〜
引手をつかって装置を移動しますが、通路も平坦とは限らないので、
バランスが崩れることもあります。そのときに、横転でもしたらパネルのスイッチ類
が破壊されそうです。そのため、移動にかなり気をつかわなければなりません。
万が一のことを考えて、プロテクトバーを取り付けました。

このままだと、装置が横転したらスイッチ類がつぶれそうです。

φ6mmの鋼材でプロテクトをとりつけました。φ6mmとなると、冷間ままだと曲げるのは一苦労ですが、
ガスバーナで赤熱する程度に加熱すれば、案外簡単に曲がります。勿論、火傷には注意です。
・引手の位置が低すぎた〜
このくらいの高さで大丈夫かな〜と思って取り付けましたが、実際に引いてみると
かなり低くて、腰が痛いです。もう10cm程度高い方がよいようなので、継ぎ足して
高くしました。

最初はこのくらいの高さで十分とおもっていましたが、低すぎました。
引手を延長して位置を高くしました。これで、快適に引けます。

不細工ですが、途中で切ったあとで継ぎたししています。切った貼ったができるのは
溶接のよいところでしょう。
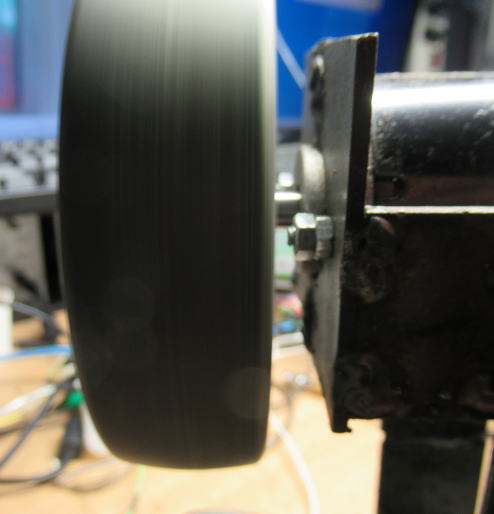
・ボールがまっすぐ飛ばない〜
これは単なる組み立て後の調整不良でした。市販のボール射出機につかっているローラは
ボールの接触面が凹形状になっているので、ローラの中心に保持されやすい形になっていますが、
今回つかったローラはキャスターからの流用ですので、ローラ形状は凸形状になっています。
そのため、ローラとボールの中心が合わないと、すぐに左右に射出方向が散らばってしまうようです。
再度、ボールとローラの中心をあわせましょう。

噛みこみがずれると飛距離もでませんし、左右に飛ぶ方向がずれてしまいます。
再度、ボール中心とローラ中心を調整です。
・ボールコンテナの中でボールが詰まって下に落ちてこない。
これはコンテナ形状がわるいのかもしれませんが、ボールを沢山いれると途中でボール同士の摩擦で
詰まってしまって、下に落ちなくなってしまいました。対策としては、ボールを攪拌するような機構をとりつけるとか、
あるいはもっと平たいコンテナにすべきなんでしょう。ただ、平たいコンテナにするにはかなりの改造になるため、
ボールの攪拌そして、ボール穴への誘導機能をもつ治具を追加で作成です。
この形状は先の動画で紹介した形状をパクらせてもらいました。作者の方も結構試行錯誤されたようです。
先人の知恵に感謝です。治具を追加したところ、ボールの排出がかなりスムーズになりました。コンテナ内の
ボール残しもなくなりました。ただ、難点があってボールを攪拌させるためにモータにかなり負荷がかかるようで、
ボールを大量に入れると回らなくなります。最大で30〜40個が限界のようです。モータ容量を大きくするか、
コンテナ形状を改善すれば、もっとボールを入れられるようになりそうですが、今後の検討課題です。

ボールを沢山入れすぎると、コンテナ内で詰まってしまってボールが落ちてきません。

ボールを攪拌することと、ボール穴にうまく誘導するためのバーを追加しました。
この形状は、先に紹介したURLでのアイデアのパクリです。作者の方も色々と
試行されたようで、これが最高の形だ!といっておられました。


色々と試行されたようです。DIYテニスボールマシンアップグレードバージョンボールランチャー - YouTube
しかし、ながらもっとも気になる課題があります。 2023.11.8
・思ったよりボールが飛ばない・・・・・
モータを電圧最大(24V程度)で回しても、飛距離は12m程度(歩幅計測 20歩x60cm=12m)しか
飛びません。最初はロータが軽いので、ボールが噛みこんだときに回転速度が急減するため、
ボールの射出速度が落ちるのだろうな〜と思っていました。すなわちロータに蓄えられた慣性力
が小さいためだと・・・・。
しかしながら腑に落ちないのは、モータ電圧を落としても(推測1/2程度)、飛距離はほとんど変わりません。
いや、むしろすこし大きくなった場合もあります。もし、慣性力が原因なら、回転数を上げれば
それだけ大きくなるわけですから、すくなくとも回転数と飛距離の関係は単調増加になるはずですが、
どうもそうなっていないようです。
高速回転しても、射出速度(飛距離)が大きくならない原因を考えると、ボールとロータの接触時間が
短くて、ボールに十分に力が伝わってないような気がしました。というのも、ボールがロータに噛みこんだ
瞬間に回転数が落ちるようですが、落ちた後の回転数は、電圧が高くなれば大きくなっているような
感じです。
ちなみに、回転数は24Vまでかけると定格7000rpm(30W)で、このとき直径10cmのロータの周速度
は132km/hになりますが、ボールが噛みこむ無負荷状態は約130000rpm(実測しました)まで【←大嘘(後述)】
回っています。となると周速度は244km/mまで上がっています。これで、ボールがロータに
噛みこんで回転速度が落ちたとしても12mしか飛ばないのが合点がいきません。やはり、ボールに
力が伝わっていないのでしょう。
対策はもっと、ロータ間隔を縮めることかな?
ボールにより力を伝達させようとしたら、ロータ間隔をより小さくしてボールとの接触時間を長く
するようにしないといけないのかもしれません。現状はボールの直径67mmに対して、
ロータ間隔は56mmなので、約11mmほど抑え込んでいる状態です。まあ、使っているボールは
新品ではないので、表面もすり減って直径は65mm程度に落ち込んでいるかもしれませんが、
それでも9mmほど圧縮しています。手で握ると9mmでも結構な力ですが、そんなものでは
全然足りないののでしょう。それに、ボールがラケットで弾いたときに、よく飛ぶのはボールが
とてつもなく変形して、その回復力も作用しているはずです。ということは、思い切ってボールを
変形させる必要があるのかもしれません。
となると、どのくらいのロータ間隔がいいのかな?ちょっと市販品などから、すこし探ってみましょう。
ロータ間隔などの具体的な数値は記載がないので、写真から判断します。
なかなか、適切な写真とかがみつかりませんが、何点かありました。
写真の遠近法もあるので、かなりの誤差がみこまれますが、どうだろう?

装置の幅がわかっているので、そこから射出窓口サイズを割り出して、ロータ間隔を推定です。 ロータ間隔は2.7cmとか3.5cmという値です。
なんだか小さすぎな感じもしますが・・・。遠近法の影響かな?

装置の幅がわかっているので、そこからロータ径とロータ軸間隔を導出です。傾きの補正はありませんが4.7cmという値が得られました。
できるだけ真っすぐ飛ばす状態からの画像キャプチャーです。ということで、案外正しいかも。

装置の幅がわかっているので、そこからロータ間隔を導出です。比較的はっきりとした画像です。
画像計測では37.6mmですが、傾きが20°あるとすれば実際の間隔は48mmくらいになります。
なんとなく信用できそうな値が2つあったのですが、47〜48mmあたりがいいのかもしれません。
さて、改造するかな?
現状が56mmなので、8mm縮めて48mmに改造したいところです。
改造自体は、2個のモータ間をつなぐ支柱をすこし切って、再度溶接で接続しなおすだけなので、
簡単です。

BEFORE

AFTER予定
問題は、間隔を縮めるとボールを射出するためのローラの最低回転数が上昇します。
回転数が低いと、ボールを圧縮できなくなり射出すらできません。となると、ちょろだしが難しくなるような気がして、
家の駐車場でちょっとボレーの練習といったことができなく可能性があります。
あとは、ボールを噛みこむときの負荷が大きくなるので、機械的な強度がすこし心配です.
さて、どうしようかなあ〜。
何事も実験だあ〜 2023.11.9
やはりやってみましょう。知見を得るためには、何事も行動が必要です。
作業は簡単です。8mm短く切って、再びつなぎ合わせるだけです。
本体からロータ回転ユニットを取り外しです。
8mm短くして切り離しました。

当て板をつかって溶接個所を固定です。ロータの位置を微調整したあとで、
ロータとモータを取り外します。このモータ類を取り付けた状態で溶接するのは怖いです。

溶接ができました。
本体に組みなおして、改造完了です。
再度、ボール射出トライ!
改造したので、再度ボールの射出テストです。
結果は効果有でした。モータ定格(24V)程度の状態で、およそ22〜23mの飛距離がでました。
いままでのほぼ倍の飛距離がでました。これならば十分です。ということは、もっとロータ間隔を
縮める余地はありそうな感じですが、まあこれで良しとしましょう。
しかしながら、またまた課題がでてきました。というか課題が顕在化しただけかもです。
課題とはボールの射出を開始したときに、1球目だけが、かなり大きく飛びます。2球目以降になると
一定の距離に落ち着きます。なにが生じているかといえば、1球目の射出ではモータの回転は十分に
上がった状態ですが、一度ボールを射出するとロータ回転速度が一気に低下し、
次の射出(約3秒後)までに、回転速度が完全に復帰しないためのようです。
現在はモータの駆動は単純なPWM制御だけになっていますが、回転数一定になるように
フィードバック制御をいれる必要がありそうです。となると、回転数検出のためのセンサーも
必要になるから、ちょっと大変です。
まあ、最初の1球目は無視してもいいのだけど、あとで遠くまで取りに行くのが面倒だしなあ〜。
まあ、ここまで動くようになったのだから、これをつかって本来の目的である”腕”を磨くことに
注力しましょう。
こんな感じで動きます(動画再生は画像をクリック)
大嘘書いてました(m_o_m) 2023.11.12
すこし前の記述にこんなことを書いていましたが、大嘘でした。
”は132km/hになりますが、ボールが噛みこむ無負荷状態は約130000rpm(実測しました)まで”
過去にラジコンカーをやっていた経験から13000rpmのモータ音ではないなあ〜と思っていましたが、
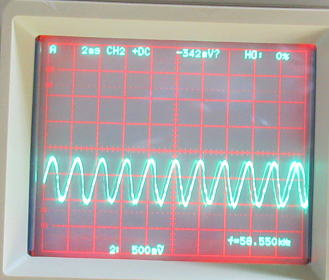
どうやら倍の値に間違えていました。というのも実測方法とはロータに紙などを貼って、LEDの点灯周期
で合わしていました。そして220Hzあたりで同期したので、その60倍ということで約13000rpmと勘違い
しましたが、あとで確認したらその1/2の110Hzあたりでも同期したので、その60倍となると約6600rpmと半分になります。
ああ、うっかりミスだったなあ〜。

ロータに紙などを貼って、これの映像が同期するLED点滅周波数を測る方法で
回転数を実測してました。
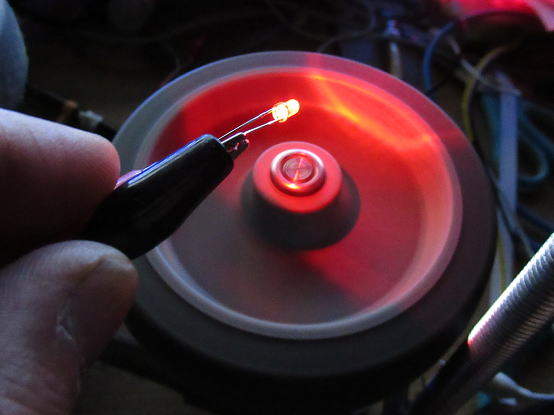
カメラじゃ上手く撮れないですが、部屋を暗くすると回転が止まって見える周波数があります。
ついでに、モータの回転数の検知方法を検討!
ロータユニットを外したついでに、モータの回転数の検知方法を検討です。
というのも、現状の課題はボール射出したときにロータの回転数が落ちることで、
ボールの射出間隔によってボールの射出速度が変化することです。
ボール射出時の回転数は常に一定にしたいところなので、そのためには
回転数の検知によるフィードバック制御が必要です。
1.フォトリフレクターを使う方法
一番まともな方法は、ロータの回転数を直接測定する方法です。ロータに白黒の塗装をしておいて
フォトリフレクターをつかって、回転を検知します。現状では、センサを設置するスペースは確保出来そうですが、
センサの設置は追加の配線とかが面倒そうです。
反射型のフォトリフレクタを取りつけるスペースは確保出来そうです。
2.モータの起電力を測定する方法
つかっているモータはDCモータなので、外力でモータ回転させると発電機に変わります。
ということで、モータの起電力を計測する方法です。これならば、制御側の基板に、
抵抗を数本とりつける程度で済みそうです。
一つはモータからの起電力を電圧レベルとして測定する方法です。モータの変換効率は高いので、
例えば24Vで回る回転数で外から回すと、モータの端子にはほぼ24Vの出力が得られます。
もう一つは、モータには極数がありますから、回転に応じて起電力に交流成分が乗ってきます。
これを取り出す方法です。
後者については、具体的に交流成分を取り出すとなると交流カップリングしたあとで、すこしアンプなどが
必要になりそうなので、すこし面倒そうです。やるならば前者の起電力(電圧)を測定する方法でしょうか。
あまり精度はよくないかもしれませんが、用いる用途では厳密さは必要ないので十分かもしれません。
モータを外力で回転させると、出力に回転速度に応じた
直流成分(起電力)と交流成分(回転数 x n の周波数)が発生します。
ということで、まずは簡単にできそうな起電力(電圧)を用いる2.の方法を検討です。
まず、想定される課題としては測定に時間がかかりそうな点です。
というのは、すくなくとも1回転以上の発生起電圧を測定する必要がありますが、その間は
モータを回す(電力を加える)ことができません。たとば600rpmで回っているとすれば、
1回転分の100msは回転動力を与えることができません。この間にモータの回転数がどのくらい
落ちてしまうだろうか、ちょっと心配です。ただ、考えてみるとモータ軸には大きな慣性力をもつ
ロータがついていますから、100ms程度の電力停止でもほとんど回転数は落ちないような気がします。
なんせ、ボールを飛ばす力はモータの力ではなくて、ロータの慣性力で飛ばすようなものでしょうから。
たとえば、モータは現状のPWM制御でなくてON/OFF制御にしてしまって、2Hzの周期(T=500ms)で
100msの時間を掛けて電圧(回転数)を計測して、モータの回転数を制御するという方法が成り立つ
かもしれません。
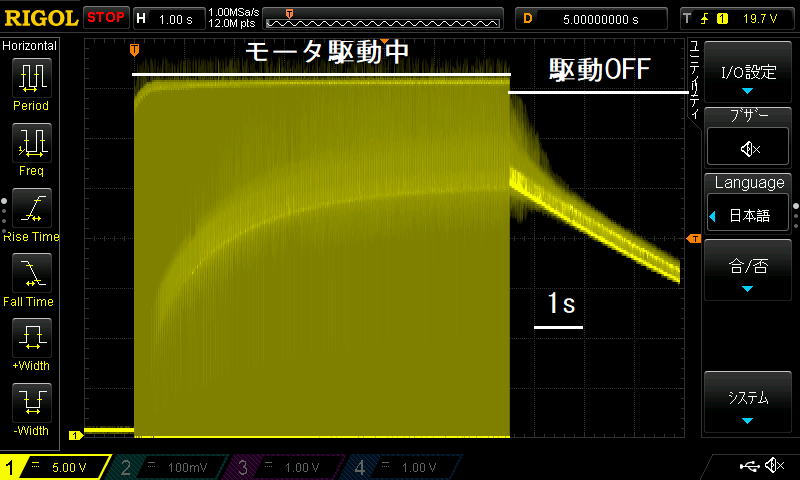
まずはモータのOFF時の起電圧を測定です。12Vで回した状態から電源を落とした場合のモータ電圧
を測定です。電源OFFからモータが完全に停止するまで、約6秒ほどかかりました。かなり大きな
ロータの慣性力です。そして、さらにOFF直後をみてみても、100ms程度では起電圧は4%程度の低下でした。
このくらいなら大丈夫かな?
なお、もっとミクロにみてみると、電源OFF直後のモータの出力電圧周波数は588Hzでした。このモータの
回転数は12Vでカタログ値で3500rpm(58Hz)ですから、10倍の周波数出力となるようです。となると、
モータ回転数の検知に100msも不要な感じです。10msもあれば十分な気がしてきました。そうなると、
モータの回転数の低下程度はほとんど気にする必要はなさそうです。
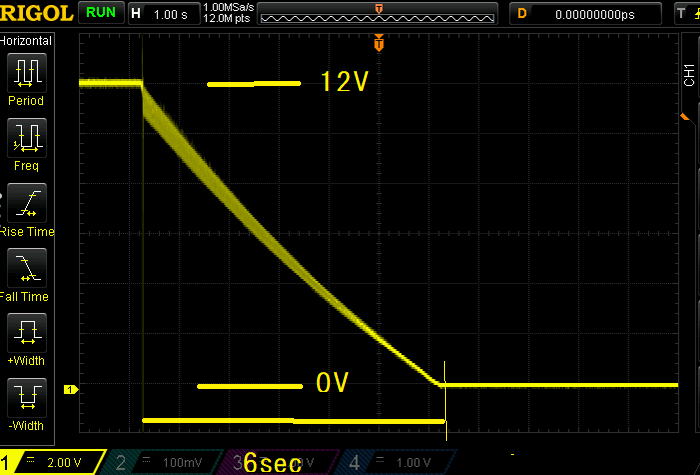
12Vで回転させた場合、電源OFFから停止まで約6秒かかります。結構長いですね〜。

電源停止後から100m後では電圧が0.5Vおちます。12Vの4%です。回転数で4%落ちるとということかな。
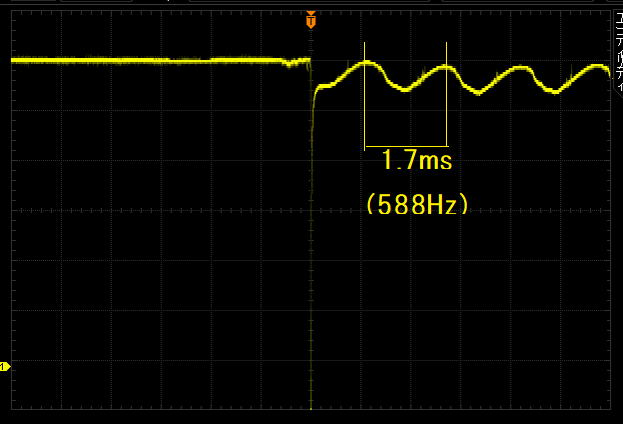
もっとミクロにみてみると、モータの起電力の周波数は588Hzと高いです。もっと短い時間の観測でも
いいかもです。
モータの起電圧の検知方法は?
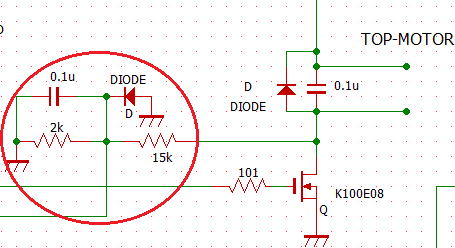
モータの駆動は現状では、MOSFET(N)をつかってドレイン側にモータを接続しているため、
そのままではモータの起電圧を測定することができません。このため、逆にMOSFETがOFFしている
ときのMOSFETのDS間の電圧を測定して、電源電圧から減算する方法がとれるかもしれません。
制御すべきモータは2個ありますが、電源電圧は同じなので必要な抵抗は6本で済むでしょう。
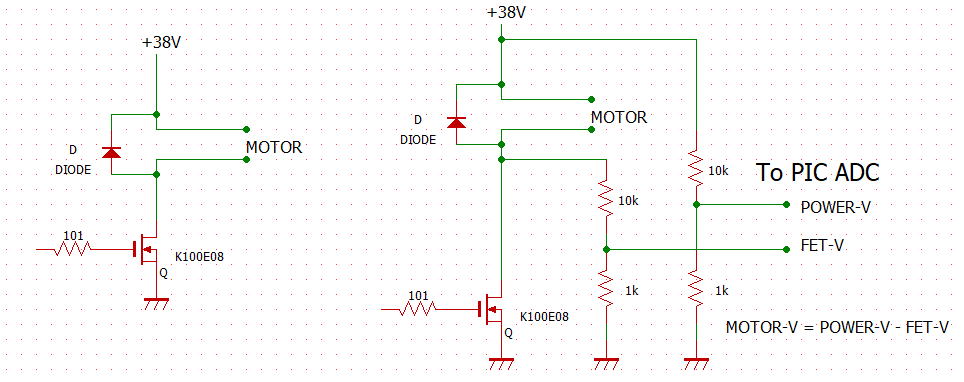
もとの回路 モータ電圧検出のための追加回路
だんだんわからなくなってきたああ〜 2023.11.13
モータの回転数の検知方法がわかってくると、回転数制御についても単なるON/OFF制御でなく、
P制御(比例制御)あたりを考えて、目標回転数への漸近をスマートにさせたいところです。
となると、モータによるロータの加減速特性が必要になってきます。減速については、
さきほど測定したところで12Vで回した状態から停止まで6秒で、ほぼ直線的な速度低下でしたから、
この時間定数がつかえます。
問題は加速特性です。電源ONしたときの回転数の上昇がどうなるかです。タコメータがあれば
簡単に測れるのですが、そんな気の利いたものはありません(あれば、回転数の測定間違いなんかしない)。
そこでモータへの通電時間を変化させて、通電OFF直後の起電力を測定することで、
加速特性を調査です。結構、原始的な調査です。
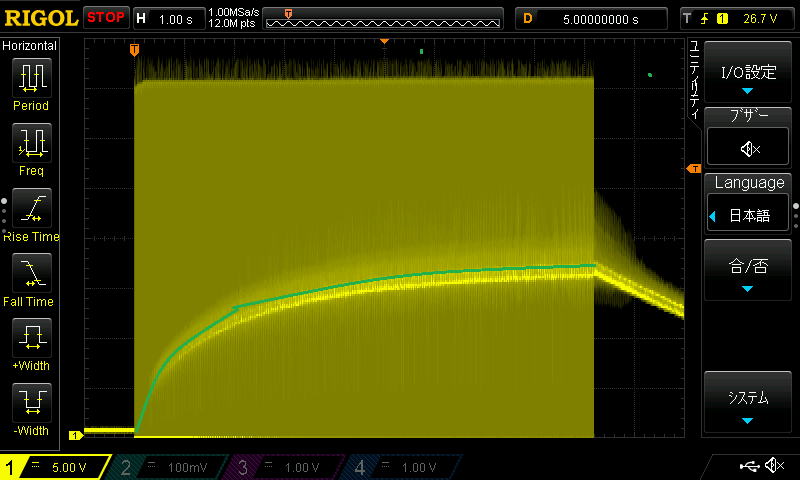
でその測定結果ですが、ちょっと予想外の結果です。通電時間が1.5秒もあれば、
たとえモータが停止状態からでもほぼ一定速にまで加速できるようです。
いままでの仮定は一度ボールを射出するとロータの回転数が落ちて、次のボールを打ち出す
まで(約3秒後)に回転数が回復しないと考えていましたが、たとえモータが停止した状態であっても
1.5秒もあればモータ回転数は回復するような結果になってしまいました。
ひょっとして、ボールの射出速度の変化は、モータの回転数の問題ではなくて、
別の原因があるのかな?あるいは、実験は直流電源でおこなっているけど、PWM制御の場合だと
勝手がちがうのだろうか?
だんだんわからなくなってきました(笑。
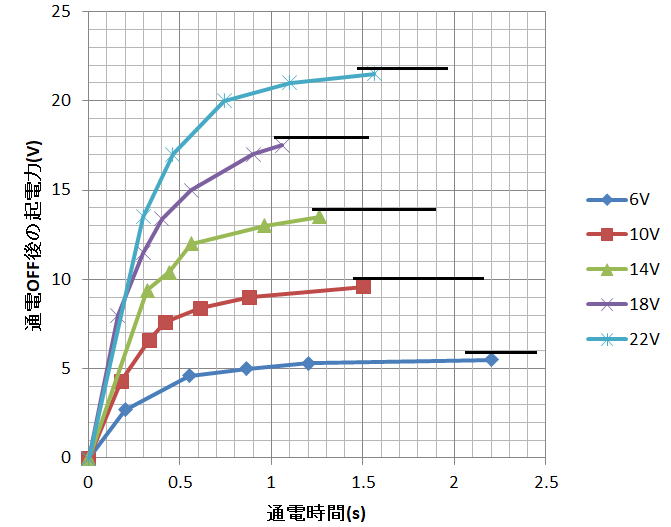
モータの加速特性です。通電電圧を変えて測定してみましたが、1.5秒程度で一定速度になるようです。
思ったより早いなあ〜。
実験用電源、壊れたあ〜
この実験の、モータ電源には昨年作った実験用電源をつかっています。
24V8A出力のSW電源が大元で、そこから電圧ドロップさせた定電圧としています。
ただ、過電流がながれるとスイッチング電源の保護回路が働いてシャットダウンしてしまいます。
モータのような負荷をつないで、24V近くまで上げていきなりスイッチを入れると、ラッシュカレントで
ダウンです。それがおきないように、徐々に電圧をあげるようにしていましたが、24Vからのモータの
起動特性を測定するために、ラッシュカレントに耐えられるように電源に100 000uF/80Vの
コンデンサを並列に接続です。ラッシュカレントはこのコンデンサから供給する算段です。
そこで、コンデンサをつけたものの実験用電源の動きがおかしいです。出力電圧がフラフラ
として、また設定値から大きくずれたりします。おそらく、コンデンサにチャージする電流が
大きいからでしょう。だましだまし使っていましたが、あるときから実験用電源の電圧制御が
できなくなって、出力が最大値に固定されてしまいました。
あ〜あ、壊れちゃった!
この電源は結構使用頻度が高いので、つかえなくなると不便です。最大近傍出力(約23V)で変化しない
ということは、おそらく元電源は無事で、電圧ドロップ回路部のMOSFETが飛んで短絡して
しまったのでしょう。
ということで、さっそく電源修理です。MOSFETのDS間の抵抗を調べると140Ωと低すぎます。
やはりMOSFETが飛んでいるようです。もう、何個MOSFETを飛ばすのだろう〜(汗。
普通は実験用の定電圧電源には電流リミッタ回路を入れるのですが、元電源のSW電源に
保護回路があるので、万が一の場合はそちらでカバーしてもらえると考えて、この電源には
保護回路なるものがありません。やはり、まずかったようです。これからは、すこし気をつけて
つかいましょう!
ということで、MOSFETを交換して修理完了です。

こいつを間に挟んでラッシュカレント対策にしましたが、仇になりました。
電源修理です。壊れていると思われるMOSFETが交換しやすい場所で助かりました。
DS間の抵抗を測定して、こわれているかどうが調べてみます。

MOSFETのDS間が140Ωでは短絡してますね。通常はほぼ絶縁状態です。

取り換え完了です。放熱板の上が壊れたMOSFETです。
ローラ速度調整はペンティング! ボールコンテナを改造しよう! 2023.11.14
ローラ速度調整については、1球目のボール射出速度だけが早い理由がまだ明確でないこともあり、
検討はペンディングです。そのため、すこし懸案のあったボールコンテナ部分を改造です。
現状のボールコンテナは100均(200円でした)のかごをつかっているけど、ボールを30個以上いれると、
円盤が回転しなくなるほどモータに負荷がかかります。そのため、余裕をみれば20個程度しかボールを
いれられません。さすがに20球だと少ないなあ〜。
なぜボールを増やすとモータの負荷が高くなるかといえば、動きをみていてわかりましたが、
基本的には円盤上のボールをすべてかき混ぜるような動作をするので、かごが四角の形状を
していると、ボール全体が回転する動作時には全体形状の変化に伴う多大な摩擦力が生じます。
そこで、ボール全体が回転しやすいように、コンテナ形状を円筒状にすることにしました。
具体的には、100均のワイヤーメッシュで囲いをつくって、その中に同じく100均で購入した
プラ板を円筒形になるように挿入です。
この対策でボールを50球以上いれても円盤が回るようになりました。どこまで入れられるかは
テストしていませんが、すくなくとも手持ちの55球では問題なく回るようです。
今度スクールに行ったら100球程度購入しておこうかな〜?でも、ボールって空気が抜けるので
あまり、賞味期限が長くありません。大量にボールを持っていても無駄になるなあ〜。
ちなみにスクールでは使用済みのボールを売っていて、
1〜49個 50円
50〜99個 30円
100個〜 20円
と沢山買うとお得ですが、100球あってもなあ〜ということで、最初は50球だけ買いました。

いままでこんなかごをボールコンテナにしていましたが、20球程度しかボールが入れられません。
かごの容量ではなく、かごの形状が問題でボール全体による円盤の回転負荷が大きくなっていました。

改良したボールコンテナです。ワイヤーメッシュの内側に
プラ板で円筒を構成しています。ワイヤーメッシュは捨てずに
置いてあったものを再利用です。ちょっと大きすぎかな?

上から覗くとこんな感じです。細長く切ってつないだプラ板を2重で挿入しています。
下にみえるまだら模様の部材は円筒内のボールを穴に誘導するためのガイド板です。

ボールの誘導板は、廃材を利用して作成です。本来は一枚板で加工したいところですが、
新規購入も勿体ないので、細長い廃材の板材を組み合わせて使用しました.

ボールが下に落ちるように、すり鉢状に加工しています。グラインダでガシガシ削りました。

50球以上いれても、ボールのかき混ぜが可能になりました。
これで、50球程度の連続した練習ができそうです。でも、本来はもっと沢山玉を入れられるようにしたい
ところですが、そのためには非力なモータユニットを交換するしかないでしょう。
ついでに、ををををををーーーー
ボールコンテナを改造したついでに、色々と試運転もしてみました。
ロータも回転させてみますが、どうもPWM制御で回しているモータの回転が一定速度になるまで
時間がかかるような音をだしています。雰囲気的に数秒はかかっていそうな感じです。
やっぱり、直流電圧駆動とPWM制御駆動の場合はモータの回転速度の上昇がことなるのかもしれません。
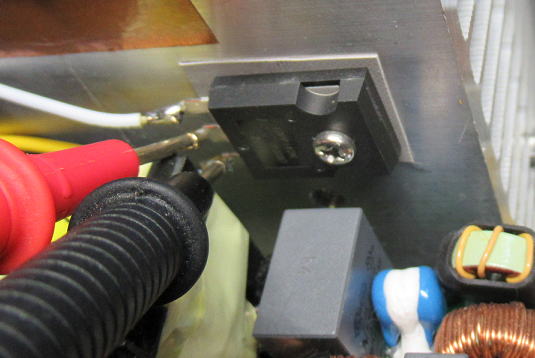
コンテナの試運転ついでに、PWM制御で動くモータの回転直後の起電力をはかってみることにしました.
モータと制御基板をつなぐコネクタの間に測定用の延長コネクタを挿入してオシロのプローブを接続です。
ついでに、実弾試射(ボールです)にそなえてネットもかぶせておきました。玄関で作業していますが、
万が一ボールが飛び出してしまえば、色々なものを壊しかねません。

PWM制御のモータ起電圧を測定してみましょう。

ボールの射出にも備えてネットをかぶせておきます。
ああ、そうなんだ!
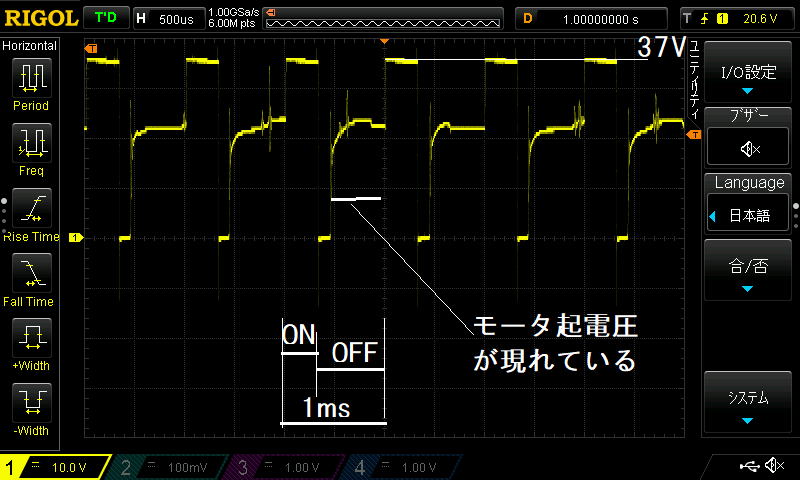
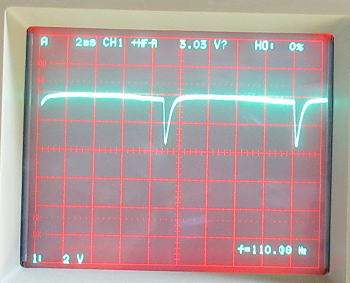
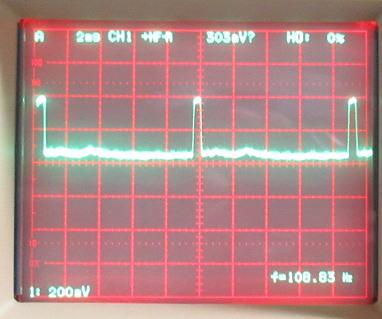
最初はどんな波形がでるかを観測です。で、その波形を観測して色々なことがわかりました。
現在は1ms周期でPWM制御をかけています。ON中はモータに電源(38Vバッテリ)がフルに
印加されていますが、OFFになるとモータに加わる電圧が一旦ゼロになったあと、その後に
電圧が現われます。そう、モータの回転による発電起電圧が現れています。
いままで、モータに加える電圧をOFFにしてから測定が必要かとおもっていましたが、
よく考えてみたらPWM制御のOFF時間にでも計測ができるのですよね。
ただ、結構変動が激しくでそうなので、かなりのサンプリング平均が必要にはなりそうです。
 。
。
PWMのOFF期間にモータの回転による起電圧が測定できそうです。
オシロでモータ起電圧が見えるということは、測定の時間軸を伸ばしてみれば、モータの起動時の加速も見えそうです。
で、試してみてみましたが、モータ駆動中にでもモータ起電圧の様子がうっすらとわかりました。これはいい!
みてみると、かなりモータの加速は直流駆動にくらべてゆっくりだということがわかりました。
いや〜直流DCモータの駆動って直流電源とPWM制御では違うんだ!
ひとつ勉強になりました。
モータ駆動中にうっすらとモータ起電圧が見えます。これからみると、かなりゆっくりと加速している様子がわかります。
こうなったら、一度ボールを射出してみて回転数の落ち方をみてみましょう。
調べると下図のようになりました。やはり、最初の想定通りボールを射出すると一気にロータの回転数が落ちます。
そしてその回復に時間がかかるので、ボールの射出間隔が異なるとボールの射出速度に影響があるようです。
テストなのでボールの数がすくなくて、円盤の回転速度も早めで約2秒間隔でボールが射出されていますが、
2秒程度ではロータ回転の回復には不十分であることがわかりました。

ボールを射出するたびにローラの回転数が落ちますが、回復に時間がかかるのでボールの射出間隔がかわると
射出速度に影響があることがわかります。
ここまでわかったら、もうすこしロータの加速について、もうすこし調べておきましょう。
PWMのDUTYによって、加速力がどの程度変わるかです。
結果は当然でPWMのDUTYがあがれば加速力が上がります。
すなわちロータの回転速度の回復を早めるためには、回転速度が低下すれば、
DUTY比を一気に最大まで上げて、所定の回転速度になるまで保持すればいいでしょう。
DUTYが低い時の加速状況

DUTYが高い(75%最大)の加速状況です。回転ゼロから2秒で27Vまで加速できそうです。
懸念はノイズかなあ〜
なんとなく、PWM制御中にモータの起電圧を測定して、モータの回転制御を行うことはできそうな
感じなんだけど、オシロの波形をみて凄いスパイクノイズがでています。PWM期間中に実施できそうな
ADの変換も数回しかできないので、うまく測定できるかな? なんらかのフィルターは必要でしょう。
まだ、色々と調べることはありそうです。
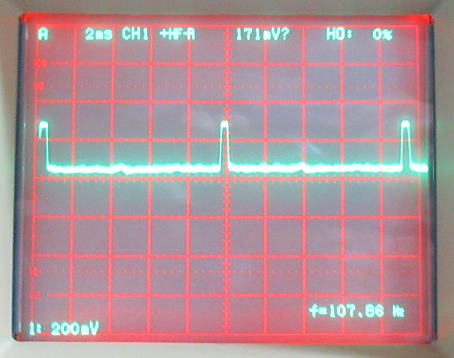
フィルターを入れてみると・・・ 2023.11.15
試しにモータの両端に0.1uFのコンデンサを追加してみました。
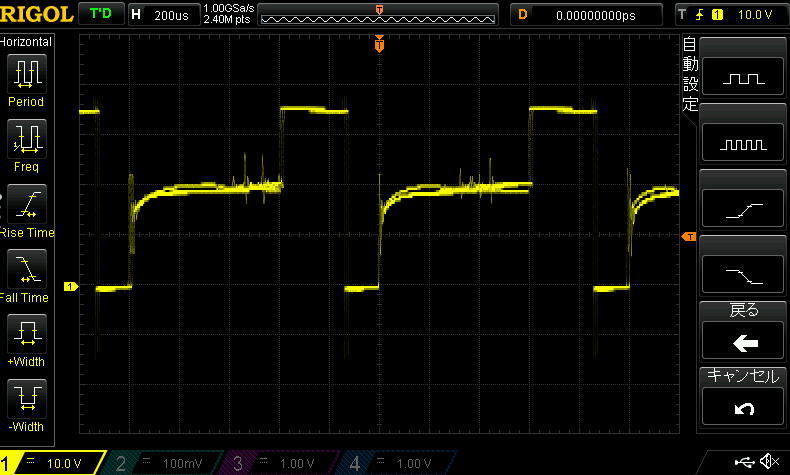
その結果、スパイク状のノイズは見えなくなりました。ただ、OFF時からの立ち上がりですこし
リンギングがでています。まあ、ADするタイミングはONする直前になるでしょうね。
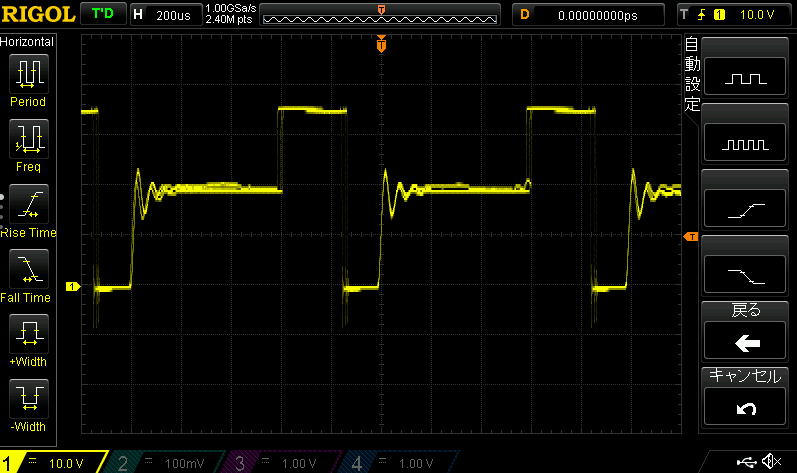
なにもしない状態のモータ駆動波形です。PWMのOFF期間にモータの起電圧がみえますが、スパイクノイズがあります。
モータの両端に0.1uFのコンデンサを追加です。スパイクノイズは消えました。ちょっとリンギングはあるようですが・・・。
やっぱりタコメータを追加するかなあ〜
最初はモータの起電圧から回転数を測定しようと考えていましたが、色々と考えるとセンサを取りつけて
回転数を直接計測した方がいいような気がしてきました。その理由はいくつかありますが、
1)多点でのサンプリング平均が必要になるが、難しいため回転数の計測精度に不安が残る。
2)プログラムがかなり煩雑になる。
3)電装系の既存の基板への追加が大きい(抵抗6本やコンデンサなど)
4)電装系の基板はスイッチ類と配線がしてあり、追加の加工をできるたけ少なくしたい。
実はもっとも大きな原因は4)です。基板にはスペースはあるのですが、
スイッチやVRとの配線がされているので、再度基板を裏返して部品を取りつけるような
ことはあまりやりたくありません。
電装系は組みあがっているので、手をいれるのは最小限にしたいです。
ということで、フォトリフレクタ―をつかった回転計を外付けで作成して、
そのデータを電装基板に電装する方式にしたいと思います。
そうすれば、電源(2本)とデータ線(2本)の4PIN程度のコネクタ
をなんとか追加するだけでいけるでしょう。データ転送はデジタルでなく
アナログにします(2000rpm/Vの出力を想定です)。
フォトリフレクタをつかってみましょう!
フォトリフレクタについては、回転数制御も考えて初期の段階で購入していました。
モータ起電圧を測定することで、要らなくなるかなあ〜と思っていましたが、
やはり出番が回ってきました。
秋月のフォトリフレクタのラインアップはいくつかありますが、対象との距離が大きくとれる
下記を使うことを考えてみましょう。その他のフォトリフレクタは距離が1mm程度のものが多くて、
なんとなくぶつけそうなのでやめました。

これが、対象物との距離が大きくとれるので使いやすそうです。
まずはブレッドボードで動かしてみます。知りたいのは、どの程度の出力レベルが
得られるかです。最初はLEDならびにフォトトランジスタにつかう抵抗は220Ωとしました。
なお、データシートではフォトトランジスタの抵抗は100Ωになっていて、そのとき
応答速度が10usが保証されています。
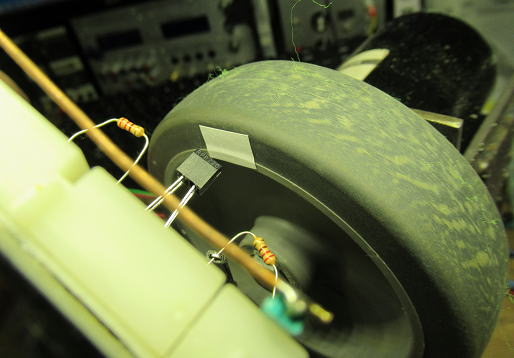
そして動作確認のため、ロータに適当に紙を貼り付けて動作テストです。
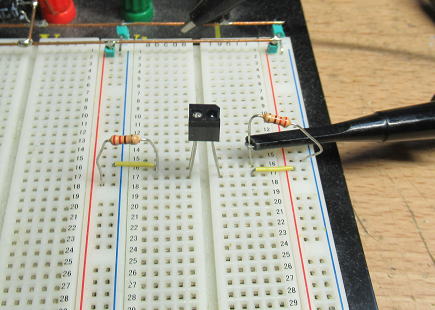
まずはブレッドボードで動かしてみます。
最初はこの程度の紙を貼り付けました。途中でもっと短く(5mm程度)にしています。
出力レベルひくいなあ〜
フォトトランジスタの抵抗が220Ωのときでは、綺麗に信号が得られました。
ただ、レベルが低いです。100mV程度しかありません。これではロジック入力に
つなげることはできません。まあ、アナログ入力にしてAD変換してもいいのだけど、
どうするかな?
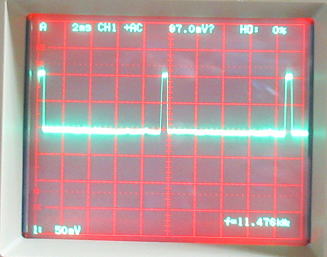
回転数は約6600rpm。フォトトランジスタの抵抗は220Ωです。
出力は綺麗ですが、レベルが低いです(100mV程度)。
ロジックレベルでは受けられません。アナログ入力となります。
そこで、フォトトランジスタの抵抗器を22kΩと100倍にしました。
そうすれば、波形は鈍ってきますがロジックで動きそうなレベルに
なりそうです。
フォトトランジスタの抵抗を22kΩに変更です。
出力は鈍っていますが、HIGH:4V、LOW:0.5V程度なので
ロジック入力で受けられるでしょう。
なお抵抗はコレクタ側にいれています。
フォトトランジスタの抵抗は小さくして、応答時間を短くした上で
変換時間がかかるアナログ入力とするか、あるいは
フォトトランジスタの抵抗は大きくして、応答時間は長くなるが、
変換不要なロジック入力するか?
22kΩのときの応答速度を他のフォトリフレクタのカタログから
拾ってみると、かなり遅くなって200us程度になりそうです。
まあ、応答が遅くてもその遅れが一定なら構わないのだけど・・・・。
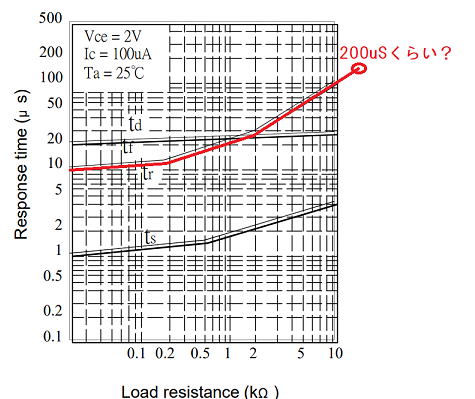
他のフォトリフレクタの特性にあてはめると、フォトトランジスタの
抵抗が22kΩだと応答速度は200us程度になりそうです。
アナログ入力かディジタル入力かどっちにしよう?
アナログにしよう! 2023.11.16
色々と考えましたが、アナログ入力にすることにしました。
というのも、ディジタルで受けるとなるとフォトトランジスタの抵抗値は22kΩ以上と高く
なりますが、そうすると外来ノイズに弱くなるのでは?との懸念です。なんせ、近くには
ノイズをまき散らすDCモータがうなっていますから。
アナログ入力にしますが、もうすこしADCでの検出レベルをあげるべく、フォトトランジスタの
抵抗値は1.2kΩにしました。こうすれば、もうすこし高いレベルがでてくるでしょう。
と決めれば、やっつけ仕事で製作です。
で、フォトトランジスタの出力をみると、上側ロータで400mV、下側ロータで300mVでした。
結構差ができてしまいましたが、反射板までの距離がちがったのかもしれません。
でも、ほとんどピッタシ6mmに合わせたんだけどなあ〜。
まあ、レベル的には十分です。ただ、ベースノイズが最大で80mV程度あるので、
検出の閾値は180mVくらい設定すればいいでしょう。
やっつけ仕事でフォトリフレクタをモータケースに取り付けました。
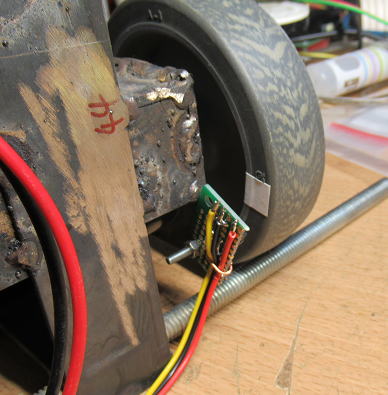
裏側からみるとこんな感じです。
上側のロータの出力です。400mV程度でています。
下側は300mV程度と少し低くなりました。取り付けが悪かったかな?
作ってみたはいいものの・・・・
フォトリフレクタをつくったものの、ちょっと頭を悩ます問題が・・・
回転数の制御は、回転が落ちたらフルパワーで動かして、所定速度に達したらパワーオフにしようかと思っていましたが、
このモータは低速域ではかなりの加速力があります。
そのため、回転数の検出時間がかかってしまうと、回転数がオーバシュートしてしまいます。
モータの加速力を拾ってみると、およそ3000〜10000rpm/secくらいありそうです。例えば、回転数の誤差を
200rpm程度に抑えようとしたら,モータ回転数の検出間隔は66ms〜20msとかなり短くなります。
でも、モータの回転速度が3000rpm程度だとすると、1回転は20msですが、回転の検出となると
反射板が来るまでまって計測を開始して、反射板が一回転する必要がありますが、最悪40msはかかります。
さらに、モータが2つあるため2つの計測をシリアルに行うと80msかかります。そうなると、かなりのオーバシュート
がでてしまいます。低速時で60msもパワーON時間が長いと600rpmも回転数が高くなって。こりゃ問題です。
対処方法としては、この2つくらいかなあ〜
・ロータに複数の反射板を取りつけて、回転検知の周期を早める。
→これは比較的簡単。4枚くらい取りつけたらかなり早くなる。ただし、反射板の設置精度が重要。
・ボールの打ちだし間隔(最低約2秒)を考えて、急激に回転数をあげるのではなくじっくり上げてやる。
→現在のロータの回転速度と、目標回転速度への到達に必要なパワーを予め求めておく必要があり、
なんだか面倒そうだなあ〜。でも、本来の制御の姿だなあ〜。

低速域では高出力で回すとかなりの立ち上がり速度になります。3000〜10000rpm/sec程度のようです。
いづれにしても、あとはソフト的な作業になるので酔っ払いモードのときは、
手を動かす作業に集中しましょう(笑。
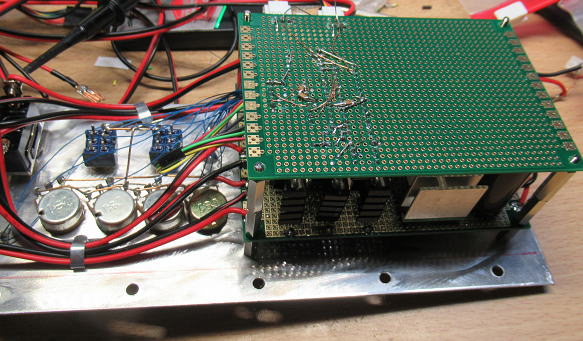
電装系の基板に、回転数検知基板との接続ポートをつけますが、配線が邪魔なので
このような無理な体勢で作業です。
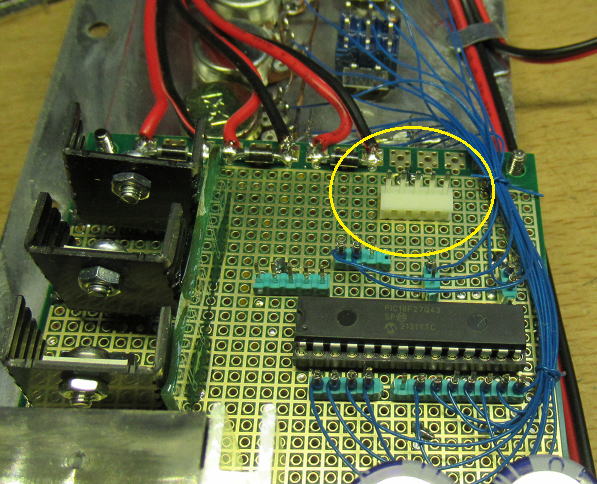
接続ポートがとりつきました。端子は電源と2つのモータの回転数(電圧出力)のみです。
回転数検出(タコメータ)基板です。PICとDAC(MCP4912:10BitDAC)が乗っかっているだけです。
回転数を検知してアナログ出力(2000rpm/V)でだすだけです。部品を片側に寄せているのは、
基板を背中合わせにしたときに電装系基板の部品と干渉させないためです。
裏返して、本体基板に重ねて実装です。
あとはソフトかあ〜 2023.11.17
ソフトの負担を軽くすべく、回転検出時間を短くするためにロータにあ90°ピッチで
白黒をつけました。白黒の通過時間を測定することで回転数を出すようにしました。

ロータに色を塗ってみました。

フォトリフレクターも反応しています。
もともと、両面テープで紙を貼り付けていましたが、回転中に遠心力で飛ばされることを
懸念しての塗装でした。が、いざ塗装してみると反対に塗料がボロボロと剥がれそうで
失敗だったかなあ〜。反対に両面テープの方が、強固に接着しているような気がします。
なかなか難しいなあ〜
回転数が一定になるように、いや低下した回転数を素早く復帰させるためのプログラムを
検討中ですが、なかなかうまくいきません。というのも、最初はON/OFF制御みたいにして
みましたが、一度回りだすと一気に所定の回転数を超えてしまいます。そこで、比例制御
も入れてみて、回転数差が大きければ電力DUTYを増やすというようにしてみましたが、
それでも回転数がオーバしてしまいます。かといって、制御量が小さいと所定の時間内に
回転数が復活しないしなあ〜。
いまは無負荷でモータを回して、様子をみていますが、やっぱり実弾(ボール)を射出してみて
どのようになるかみてみました。
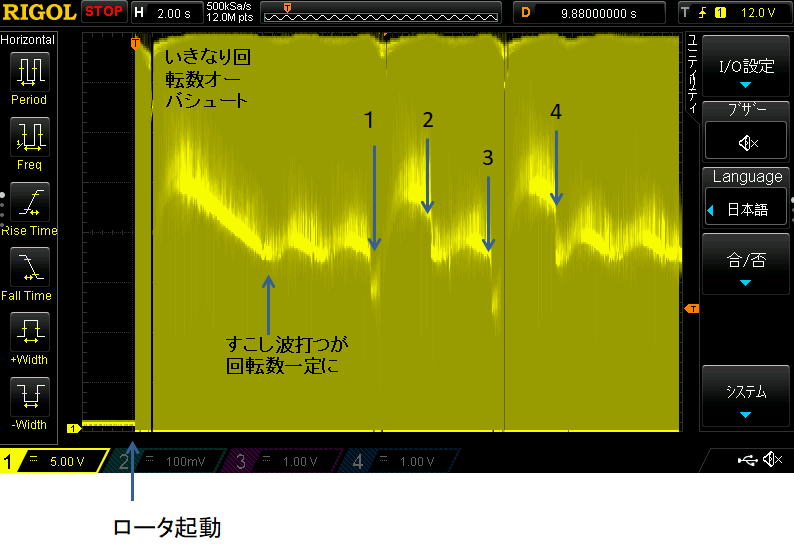
やっぱりだめだあ〜
まず、最初にロータを起動した段階でモータ回転数がかなりオーバシュートです。その後、自然と回転数が下がり
すこし波打ちながらも一定回転数になります。
そして、1発目。回転数が急に下がりますが、それを検知して回転数を上げますがまたもやオーバシュート。
そして、オーバーシュートが落ち着かない間に2発目。こんとは偶然にも、所定の回転数あたりまで低下したので、
3発目は良い感じ。でも、3発目のあとはまた回転数がオーバシュートして4発目です。
こりゃ、最初より悪くなったぞ。
最初はモータに巨大な慣性をもつロータが結合しているので、モータに電力を与えて一定の回転になった時点で、
電力を搾ればその回転数で収まるかと安易に考えていましたが、一旦加速しだすと電力を止めても増速しているような
感じです。
比例制御だけど、回転数が落ちたときに、回復のための電力は回転の加速を見据えて早めに止めないといけないようです。
でも、そんな難しい制御はできないなあ〜。それに、回転数の計測遅れもあるしなあ〜。
もう、エイヤで回転数が落ちたら一定の電力を一定時間加えて、しばらく放置ということの方がいいかもしれません。
上の図をみていると、DUTYを上げて数10msも動かせば、勢いでもとに戻りそうです。
しかし面倒だなあ〜
ソフトの修正が、機械に取り付けたままできればいいのだけど、現在はそうはできません。
ディスクトップPCでプログラム作成して、机上でPICを焼いて、その後に電装系を玄関先に
置いてある実機に取りつけて、稼働させる。再度デバッグには電装系を取り外して・・・・
なんとかならないものかな〜。実機を部屋に持ち込んでもいいけど、ICSPのケーブルが
届かないような気もしてきました。
あああ〜。
いっそのこと・・
パターン制御に変えちゃおうか?
1.モータ駆動DUTY比とロータの回転数の関係を調べておいて、基本はDUTYのみで回転数を設定。
2.ボール打ちだし時の回転数低下は、ボールによって多少の差はあるでしょうけど、それを調べておいて、
打ちだし直後から元の回転数に戻すための駆動DUTYと時間のテーブルを作成。
上記について、10点程度調べておけばあとはデータテーブルでの内挿で事足りそうな感じもしてきました。
ただボールの打ちだしだけは検知しなくてはいけませんが、それは回転数を測定しているので、急減したことで
判断すればいいでしょう。
やっぱり表示器欲しい!
色々調べるにしても、プログラム中の変数の値がわかるようにしたいものです。DUTYが現在どのくらいなのかも
わかりません。実働時には不要だとしても、LCDをつけておいたほうがいいかもです。
さてさて、どうしたものか・・・・寝ながら考えましょう(笑。
ソフト大改造!2023.11.19
過去のデータを見返していて、ボールを射出したときの回転数低下を拾ってみると、
概ね回転数によらず、1550rpm程度(範囲としては1300〜1700rpm)と一定であることが
わかりました。ということで、下記方針で作り直すことにしてみました。
結局、実稼働中にはフォトリフレクタによる回転数計はつかわず仕舞いですが、
回転数の測定には役に経ちました。
<事前調査>
1.モータ駆動DUTY%とロータ回転数のデータ取り。
2.回転数を一気に1500rpm上げるための、高DUTY比(70%)駆動時間のデータ取り。
<ハード追加>
3.モータ起電力測定のための部品追加
<ハード削除>
4.フォトリフレクター回転数計
<ソフト構成>
5.モータ駆動はVRでDUTY比のみを変える単純制御。
6.ボール射出を検知した場合は、直後に所定時間の加速を行う。
という感じで、回転数のフィードバック制御はおこなわずパターン制御みたいな形にしました。
すこし、詳細を羅列です。
1.モータ駆動DUTY%とロータ回転数のデータ取り
DUTY比を変えながらモータの回転数を調査です。意外なことに、DCモータってもっと電圧にリニアに反応
するのかと思っていましたが、PWMの場合は高DUTYになると飽和気味に鳴る感じです。このモータの特性
かもしれませんが・・・。
この関係がわかれば、所定の回転数にするためのDUTY比テーブルを作成です。本来は指数関数を
計算して細かく設定できるようにしたいのだけど、計算不可を軽くするためにテーブル方式にしました。
1000〜8000rpmで50rpm毎の141点のテーブルを作成です。これで、回転数はVRでリニアに調整できます。
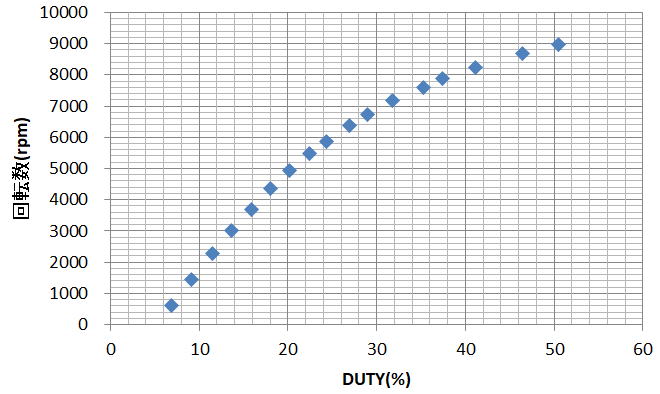
DUTY比とモータ回転数の関係です。もっとリニアになるかと思いましたが、飽和気味です。
10000rpmには届かないかも。
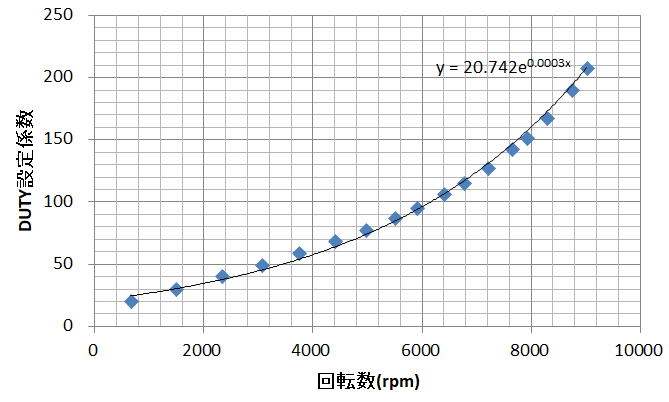
所定の回転数にするための、プログラム中のDUTY係数の関係を導出です。
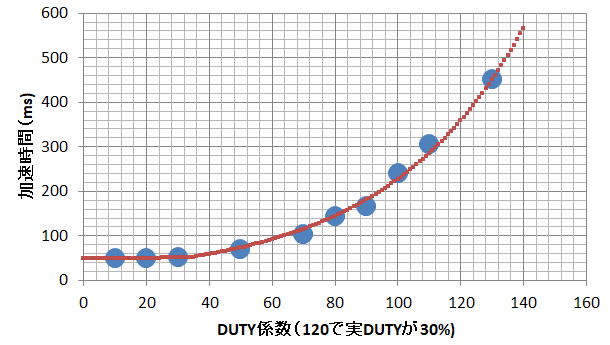
2.回転数を一気に1500rpm上げるための、高DUTY比(70%)駆動時間のデータ取り。
この測定はかなりいい加減です。回転数計の出力はアナログになっているので、オシロに接続して
測定です。モータを所定回転数で回したのち、モータ電源をOFFにして、1500rpmほど下がったなと思った
瞬間に加速させて、元の速度にほぼ近くなる加速時間を調査です。スイッチの入れるタイミングがかなり
ばらついてしまうかもしれません。
でも、測定したデータは概ね直線的でした。回転数が上がると、すこし加速に必要な時間が長くなります。
まあ、加速時間は概ね1秒以下なので、ボールの射出間隔が2秒以上あることを考えると、のこり1秒で
回転数の超過あるいは不足分はある程度、吸収されるでしょう。
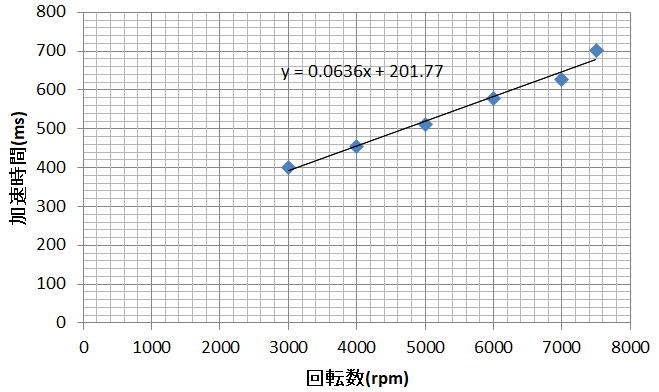
モータ回転数を一気に1500rpm上げるための加速時間を調査です。回転数をオシロで追いかけての
手作業なので、結構データがばらつくかとおもいましたが、それほどでもなかったです。ただ、再現性
は疑問だなあ〜。
3.モータ起電力測定のための部品追加
これを追加するかどうかは結構悩みました。あまりやりたくなかったので。
ボールの射出を検知するには、フォトリフレクタ―による回転数計でもよかったかもしれません。
しかし、回転数計ってモータ近くにあるので、稼働中に壊してしまう可能性もあるので、本来は
できるだけ避けたい実装物です。そのため、回転の急減検知だけをするなら、モータ起電力測定でも
こと足りそうな気がしてきました。そのため、すこし面倒ですが部品を追加です。
モータ起電力でのモータ回転数の検知は誤差は大きいですが、なんせPWM周期の1ms毎に
測定できますので、フォトリフレクタ―による回転数計より応答が早くなる点がいいです。
追加した部品です。
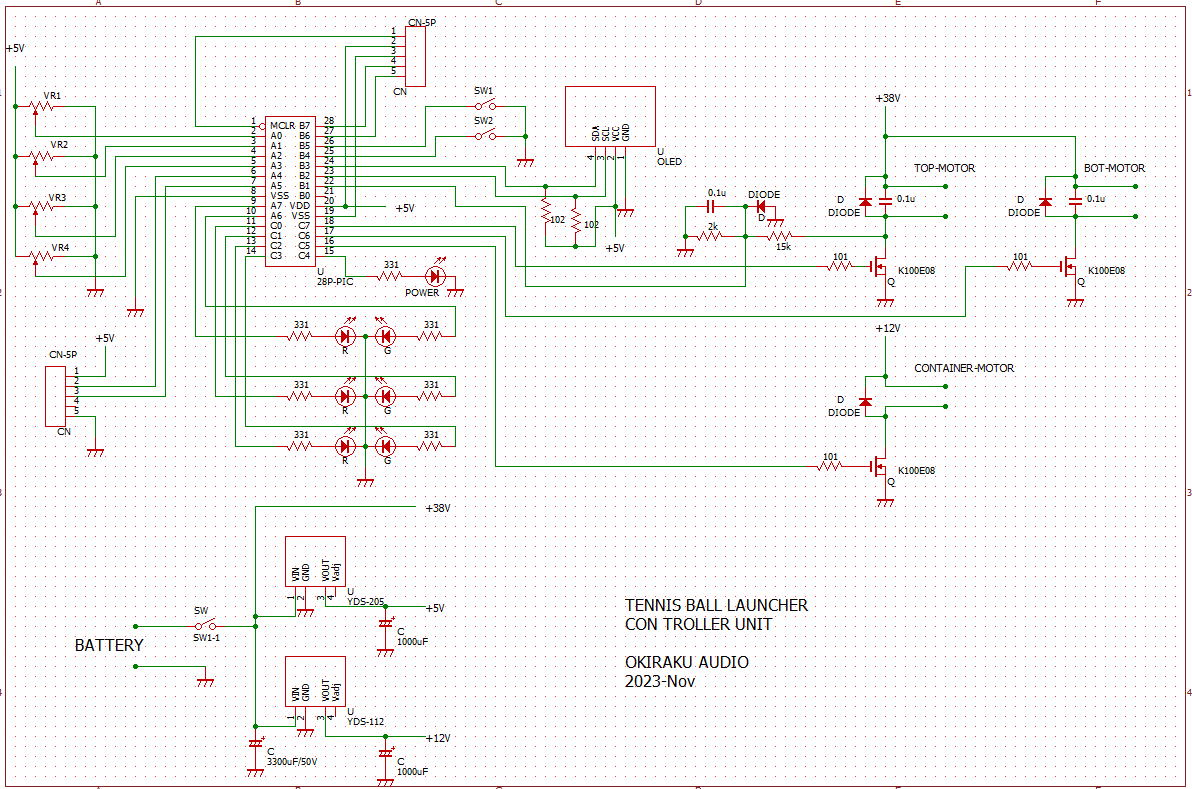
全体の回路です。だんだん部品点数が増えてきました。
さっそく、実弾試験!
さて、ソフトを改造したので、これで上手くいくか早速の実弾試験です。
ぎゃあ〜
最初は低い回転からトライですが、1球目を打ち出したあと暴走です。
回転速度回復の時間が設定よりもの凄く長くなって、超高回転ではりついています。
原因は、回転数急減の検知は、同時に急増にも反応するようになっているのを失念していました。
というのは判定方法として過去16msの時間で1ms毎に回転数(起電力)のデータをとっておき、.
その最大値と最小値で一定の差があれば速度が変化したと判定していましたが、
これだと急減でも急増でも反応してしまいますね.
ということで、一回急減でソフトが反応して加速にかかりますが、こんどは急増で反応してしまって
さらに加速、そしてまた急増検知の繰り返しでモータが最高回転になるまで加速を止めませんでした。
もう、暴走と同じです。
そこで、一度急増あるいは急減を検知して、加速動作をしたら1秒間は強制的に加速状態に
はいらないようなWAITを入れました.

最初のテストは暴走でした。
これで、暴走は収まりました。
つぎは、回復後の回転数に大きな誤差がありました。これは机上での実験環境と実機での動作環境が違うため、
係数がかなりずれていたためです。最初は補正係数を準備して、調整していましたが、.何度も係数をトライするのが
面倒になってきて、もう現物でボールを射出しながら、係数テーブルを再度作成することにしました。
数点の実測データをとったのちは、あとは近似指数曲線を求めて、それから加速時間のテーブルを作成です。
実際にボールを射出して、回転数変化が最小になるようなテーブルを作成です。
良い感じになりました!
再度作成した加速時間テーブルを用いて、いくつかの回転数で実際にボールを射出してみました。
射出時の回転数の変化もかなり小さくなって良い感じです。
回転数が遅いところで、すこし変化がでていますが、ここまで遅くするのは
ちょろだしのときで、実戦にはほとんど使わない領域ですから無視できるでしょう。
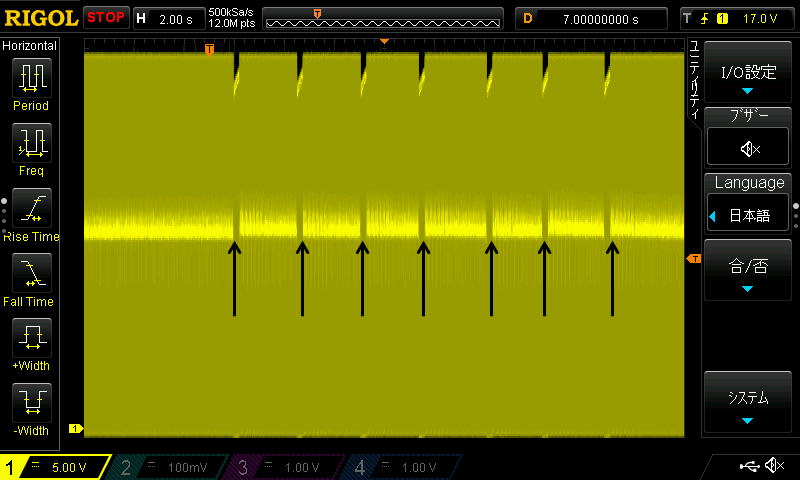
ほとんど回転数の変化がでなくなったようです。

すこし回転数を落としてみましたが、良好でしょう。
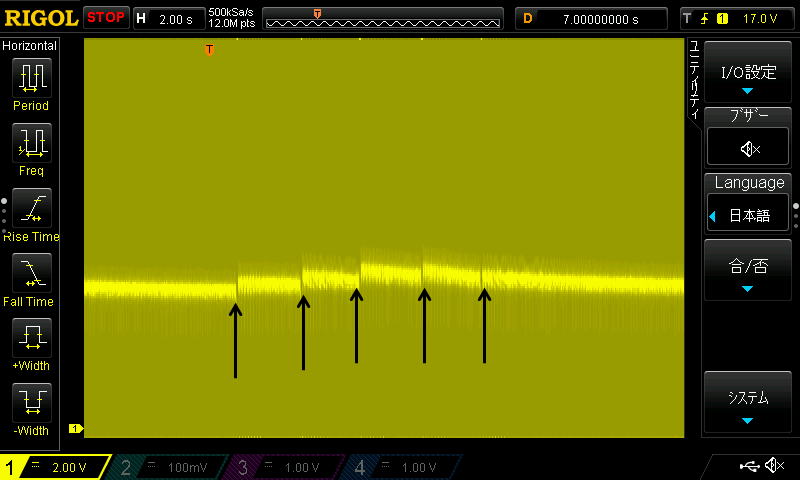
かなり遅いところでは、すこし差がでるようですが、こんな領域ではほとんど使わないです(上のグラフと縦軸目盛りが異なっています).
さて、これで電装系についてはほぼ完成としましょう。

玄関先でテストしていました。ボール受けに洗濯かごを借りていましたが、見事破壊してしまいました。怒られました(笑。
残る懸念は
ボールコンテナを改造しましたが、単純な円筒ではボールが上側に荷吊りがおこってしまって、
まかなか下に落ちてこないときがあります。そうなると、しばらくボールがでてこなくなってしまいます。
練習の為には、常に一定間隔でボールがきてほしいものです。ボールの数がすくなくなると、
常にボールがでてくることから、ボールの積み高さは押さえたほうがいいでしょう。
で、荷吊りした状態でもボールがでるようにしようとすれば、攪拌棒の高さを大きくすればいいのですが、
そうなると回転モータの負荷がさらに大きくなるので、現状の貧弱なモータでは恐らく無理でしょう。
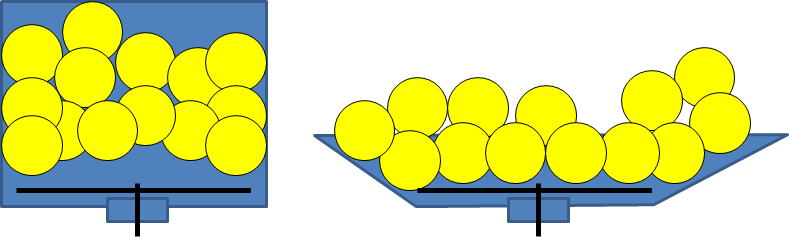
改造したコンテナでは”荷吊り”が起こって できるだけ平たくボールが展開できるようにしたほうが良いでしょう。
ボールが下に落ちにくくなります。
また、この改造は時間のあるときにでも行いましょう。
2号機への誘惑?
ボール射出機を作ってみましたが、やはり工作って楽しいです。
今回の製作で、いろいろとわかったこともあるので、色々と改良した2号機もつくってみたくなりました。
折角なので、
1.左右、上下に射出が振れる(スマッシュやロブ対応練習にも応用できる)
2.球速もプログラム化(色々なパターンで飛んでくる)。
3.ボールも100球以上はいるようにする
といったところを考えてみたいものです。
ああ〜、完全に手段が目的と化しているなあ〜(笑。
洗濯かごが到着
破壊してしまった洗濯かごはそのままにはできないので、新品にして妻にお返しです。
AMAZONから巨大な箱でとどきました。いや〜中身より物流コストの方がかかってるんじゃないかと
思ってしまいます。
で、肝心なのは勿論中身ですが、ダンボールをみていてふと、思いつきました。
これをつかって、ちょっとボールコンテナのテストをしてみましょう.。
カッターで適当に切り取って、平底になるようなボールコンテナをつくってみました。
テストなので、適当にクラフトテープで貼り付けています。

洗濯かごが巨大な段ボールで送られてきました。あ、この段ボールが使えそう。
結果は上々です。ボールの排出がスムーズになりました。それに加えて、モータからの悲鳴
もなくなったようです。以前は、もう限界だあ〜という感じの音が頻繁にでていましたが、
この形状のコンテナにしたらそれも無くなりました。

粗雑な製作ですが、段ボールでボールコンテナを作ってみました。なかなかよさげな感じです。

ボールの送り出しもスムーズになりました。モータ電流を測定してみましたが、
以前より半分程度(300mA、12V)くらいに落ちました。
無計画な製作
試作テストが上々なことをうけて、手持ちの材料をつかって、本ちゃん用のボールコンテナ
を作りたいという誘惑に駆られてしまいました。もう、.こうなると無計画に物事が進んでいきます。
コンテナ形状を平底にするのはいいのだけど、それでは移動時や収納がやっかいになるので、
折りたためるようにしておきます。そこで、登場するのが蝶番です。
他の工作用に購入してあった蝶番を加工です。ちなみに、もともとの蝶番は溶接用なので
穴はあいていません。蝶番でも結構な値段がするのですが、穴があいていないと結構安価な
もので、この蝶番は10個で900円程度でした。サイズはすこし大きいのですが、
小さくしたい場合はグラインダで半分に切ってつかうこともできます。
で、さっそく蝶番に穴あけです。一つの小さい穴は板(100均で購入してあった薄い合板)を留める穴。
もうひとつの大きいは、その留めるためのボルトのナットを逃がす穴です。これがないと、板が綺麗に
折りたためません。

溶接用の蝶番に適当に穴あけです。大きい穴はボルトのナットを
逃がすためのものです。
蝶番の加工が終わったので、板を適当なサイズに切って取り付けです。
蝶番と板とはM4のボルトで留めています。蝶番と本体は溶接で留めています。
蝶番に逃がし穴もあけてあるので、綺麗に外側に折りたためることができました。
ただ、無計画に進めているので、板の固定方法やコンテナの4隅の埋め方については
未定です(笑。 寝ながらでも考えましょう。

急ごしらえで、こんな感じで板を取り付けました。4隅の隙間をどう埋めるかはまだ考えていません(笑。

蝶番で取りつけているので、収納時のサイズも小さくなります。
ここまでできると、やっぱり動かしたくなります。4隅の隙間にクラフトテープを貼って
ボールが飛び出さないようにしました。こんな状態ですが、動かしてみると、ダンボールでの
テストと同様に、良好な感じです。モータの負荷も小さいですし、ボールの排出もスムーズです。

とりあえず、コーナの隙間はクラフトテープでつないで、試運転です。いい感じです!
さて、残りの作業はまた次の機会にしましょう。まずは、4隅をどうするかを考えなくっちゃ!
初速も測ってみたい!
球出し機を作りだした当初から、ボールの初速がどのくらいでているか調べてみたい気がありました。
スピードガンみたいなものがあれば簡単ですが、もちろんそんなものありませんし、買っても使う用途
がないです(それに、結構な値段もします)。
そこで、光センサーをつかって、2点間の通過時間を調べる方法を考えていました。LEDの光を
レンズで平行にして、受光器側では再度レンズで収束させてフォトトランジスタなどで受けてやろうかと
思っていました。レンズは100均で小さい虫眼鏡でも買えばいいかな〜と思っていましたが、この方法だと
光はまともに平行にならないだろうし、測定誤差も大きいだろうな〜と、実行はすこし躊躇しています。
できれば光源にレーザポンインタがあればいいのだけど、高価という先入感があって見送っていました。
でもAMAZONをみているとレーザポインタも結構安価なものでした。安いものだと2千円程度で買えます。
ただ、最低2個は必要だしなあ〜。
で、さらに調べてみるとレーザポインタのモジュールだけでも売っていて、これが安い!なんと20個で
1500円程度。1個あたりすると100円もしません。こりゃ、いいかも!
というわけで買ってみました。ただ、20個もいらないし、それにそのレーザはクラス3だったので、
もうちょっと安全な方がいいな〜と思っい、さらに探しました。すると10個で1500円程度のクラス2レーザ
のものがあったので、それを選択することにしました。
で、購入したブツをみてもっと大きいかと思っていたら、かなり小さいものでした。
ほんとに動くの?とおもってとりあえず5V電源をつかって、全数調べましたが、問題なく動きました。
レンズを回すと、焦点径も変わりました。
まあ、用途が簡単な速度計なので焦点は大き目でいいですが。でないと、フォトトランジスタとの
位置合わせが大変そうです。

レーザポインターモジュールが安価で売られています。1個あたり100円ちょっとです。
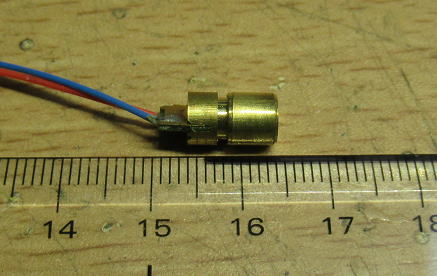
現物は思ったより小さいです。
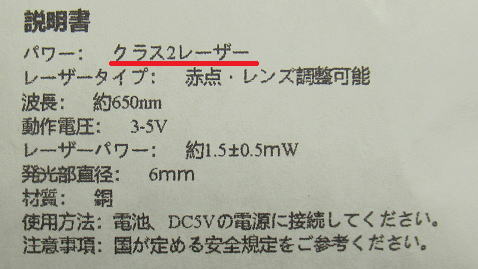
クラス2ですが、直視しないようには注意が必要です。レーザによっては
散乱光ですら危ないものがあります。
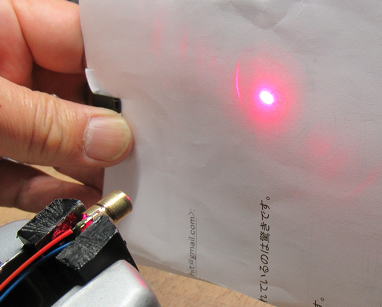
先端の筒にレンズがあり、それを回すと焦点径が変えられます。
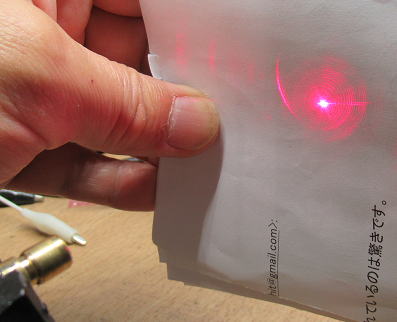
すこし絞ってみました。
ちゃんと受光できるかな?
このレーザの波長は赤(650nm)なのですが、この波長に感度ピークとなるフォトトランジスタが秋月ではみつかりませんでしした。
つかえそうなのが、下記でした.。ピーク波長が560nmですが、650nmでも半分程度の感度がありそうです。
本来ならば、フォトトランジスタではなくて高速なフォトダイオードをつかいたかったのですが、ちょっと高かったので諦めました。
それに、ボールの初速を測る程度で、そんなに高速な応答は必要ありませんしね。

合わせて購入したのはこのフォトトランジスタです。
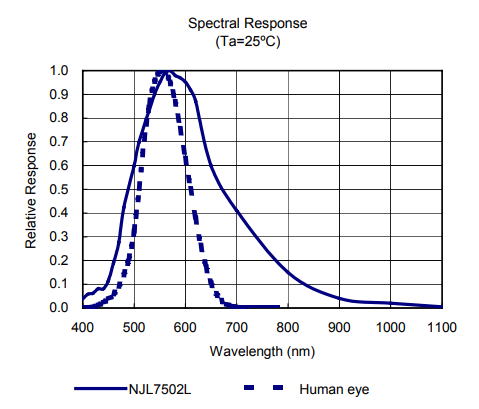
波長特性からレーザ(650nm)の感度も半分程度はありそうです。
早速動かしてみましょう!
フォトトランジスタのエミッタ-GND間に1.8kΩの抵抗を接続して5V電圧を加えます。そして、エミッタ電圧を計測です。
適当な遮蔽物でいいのですが、なにか高速なチョッパということで、モータ軸に適当な紙をとりつけて代用です。
で、流石にレーザの出力が大きいのか、フォトトランジスタはほぼ完全にON/OFFで切り替わる出力です。
オシロ波形もほぼ0〜5Vのフルスイングです(フォトトランジスタのVce電圧が降下している程度)。
流石にこのセットアップでは、モータを高速回転させることは無理ですが、まあ動作は確認できました.
一番面倒なのは、レーザとフォトトランジスタの光軸合わせです。
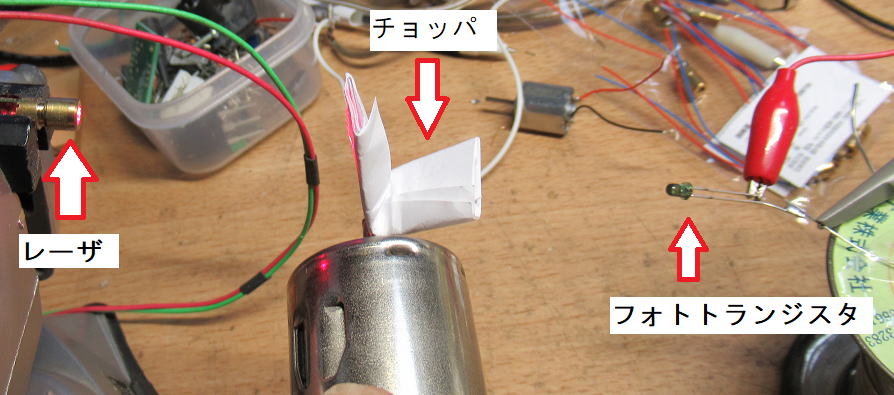
いい加減なセットアップですが、これで動作確認です。

綺麗な出力が得られました。これなら、ディジタル端子に直入力できそうです。
あとは簡単な治具をつくって、マイコンで時間計測するソフトを組めばいいでしょう。
測定間隔を300mm程度とすれば、時速100kmのボールなら、通過時間は10.8msです。
クロック1MHz程度でも、十分な分解能で速度計測できるでしょう。治具としては
できるだけ短い距離にしたいので100mm程度でもいいかもしれません。
話はもとに戻って
残課題を対処 2023.11.23
懸案のテーブル回転モータの増強
現在つかってるモータより大きなモータをつかった物はAMAZONでもあったのですが、
ALIをみているとAMZONより4割ほど安いものがあったので購入しておきました。
従来モータ(22kgf/cm)に比べてトルクは3倍強(70kgf/cm)あります。
ただ完全に置き換えられるわけではなく、軸径は6->8mmに大きくなっていますし、
モータ電圧も12->24Vになっています。
モータ電圧に関しては、電チャリバッテリ(38V)からのPWM制御に切り替えます。
もともと12Vを元電源のPWMになっていたので、元電源を変更するだけです。
軸径が変わるのは厄介ですが、安価な方法でトライです。30mm長さのM8の
長ナットをつかって、片側は8mmドリルで15mm深さの穴をあけて、片側には
M8->M6変換の埋め込みナット(長さ15mm)とつかいました。そして、モータとM6ネジを
取り付けたあとはM6ネジは長ナットに溶接で固定です。そしてモータ軸(Dカット)と
M8長なっとは、イモネジ(M4)で固定したあと、イモネジを溶接で固定しました。
なぜイモネジまで溶接したかといえば、従来モータのときにイモネジをしっかりと締めても
緩むことがありました。モータ軸はDカットなのでしばらくは空回りはしなかったのですが、
さらにイモネジが緩みだして、ついに空回りです。そうなると、ボール円盤をはずせなくなり、
往生しました。ということもあり、ネジの締め増しをしなくてもいいように溶接したわけです。
やはりモータを大きくすると、回転トルクに余裕がでるようです。モータからの悲鳴も
聞こえなくなりました。

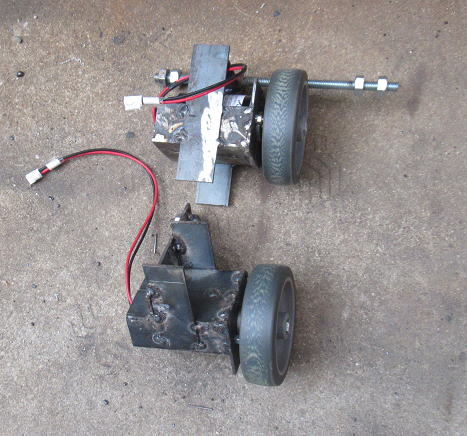
ボール円盤の回転モータを交換することにしました。下が今までつかっていたもの。
上がALIで購入したモータです。ギアユニットも大きくなりました。トルクも3倍強です。
ALIで購入したので、従来モータより安価でした。
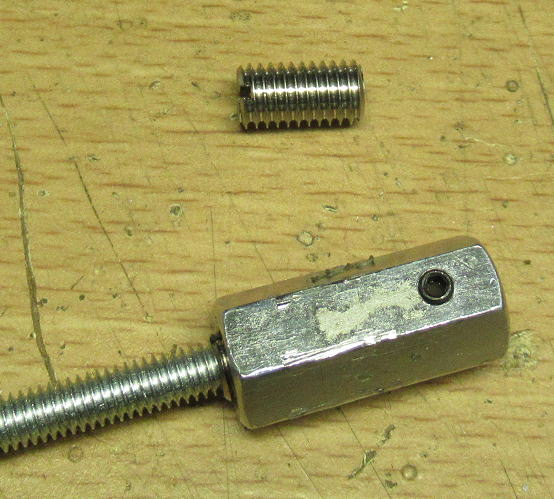
モータの軸はφ8なのでリジッド継手はM8の長ナットをつかいドリルで穴あけです。
ボール円盤の軸はM6なので、M8->M6の埋め込みナットをつかって軸が入るようにしました。
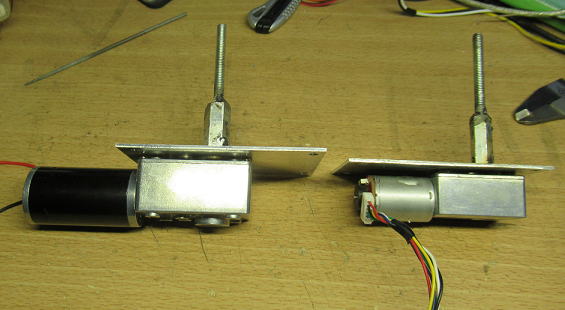
従来モータ(右)と同様に、取り付け板へのプレートもできました。
円盤軸とモータ軸の留めネジは溶接で固定です。
動かしていると、どうしても押さえナットだけでは緩むので、
やむなく溶接で固定です。
ボールコンテナの4隅の対処
色々と考えましたが、簡単にできる方法としました。プラ板をWクリップで挟むだけです。
ただ、ボールを勢いよくいれたりするとWクリップでは押さえきれないので、
平板にネジをとりつけて、プラ板にはあけた穴に引っかけるようにしました。
簡単な方法でしたが、これで問題なく動作することを確認しました。

ボールコンテナの4隅についてはプラ板を配置することにしました。Wクリップで留めます。

Wクリップだと滑るので、プラ板に穴をあけてネジ頭に引っかけるようにしました。
Wクリップは単にプラ板を押さえるだけの役割で済みます。
回転時のモータ電流を測定してみると、無負荷時で80mA程度で、
ボール49個いれてかき回した状態では、最大でも160mA程度した。
モータの定格が1.1Aなのでまだまだ余裕があります。
こりゃ、ボールを100個くらいいれても大丈夫かもしれません。
ただ、ボールがコンテナから溢れだすだろうな〜。
ボールの初速計測に戻ります
やっつけ仕事でフレームを作ろう!
レーザとフォトトランジスタを配置するためのフレームを作成です。
100均で購入したMDF板を2枚つかいました。こうして、スピーカ作成用に
取っておいた貴重な板がどんどん無くなっていきます(笑。
レーザの間隔は板サイズ(300x300mm)からできるだけ大きくするために270mmとしました。
まず、レーザ側の板を加工します。レーザを取りつけて板を接着です。
そして、レーザを点灯させて、フォトトランジスタ側の板の照射位置にマーキングして、
そこに穴をあけてフォトトラをとりつけました。
最初は、レーザ側に位置角度調整用のネジをとりつけようかと思いましたが、
とても面倒なので、レーザの当たる位置にフォトトランジスタをおきました。
そのため、フォトトランジスタの位置は当初より数mmズレていますが、
まあ、誤差の内でしょう。
MDF板をつかってレーザとフォトトランジスタを固定するフレームを作成しました。
手前がレーザで、対向する板の穴の位置がフォトトランジスタです。

ボールの通過空間は150mmです。ボール直径の2.3倍あります。間違ってボールが当たったら
MDFなんか粉々になりそうなので、余裕を持たせました。
フォトトランジスタ側の配線です。超やっつけ仕事です。
基板はモータの回転数検知用に作成した基板を流用です。不要な部品がいろいろと乗っていますが、そのままです。
時間を計測する水晶発振器は25MHzのものを乗せました。これは、秋月の福袋に大量に入っていたものなので、
ソケットもつかわず直付けです。
あと、野外でつかいますから本体のバッテリ(38V)から電源がとれるようにDCDCを搭載です。
このDCDCも安かった(50円)ことから50個もかったので、どんどん消費しなくっちゃ!てな感じです。
測定用の基板もとりつけました。モータの回転計につかった基板を流用したので、
配線は簡単でした。
ソフトを作成しよう!
表示器にOLEDを搭載していますので、ここに速度が表示されるようにします。
あとでしまったことに気付きましたが、OLEDの上にDCDCがあるので、上からは
視認性が悪いです。もう、変更はできませんが・・・・。
ソフトは極めて簡単です。
単純に、2個のフォトトランジスタのON間のカウントを計測するだけです。
そして、そのカウント値から速度(時速)に換算して、表示します。
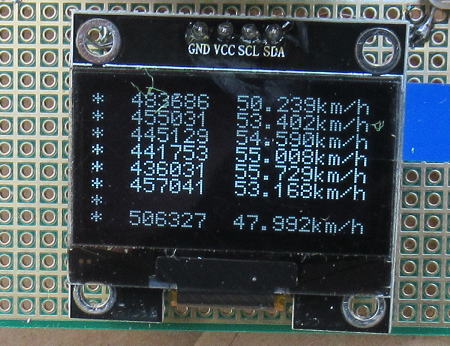
まずは適当に手をかざして、デバッグです。
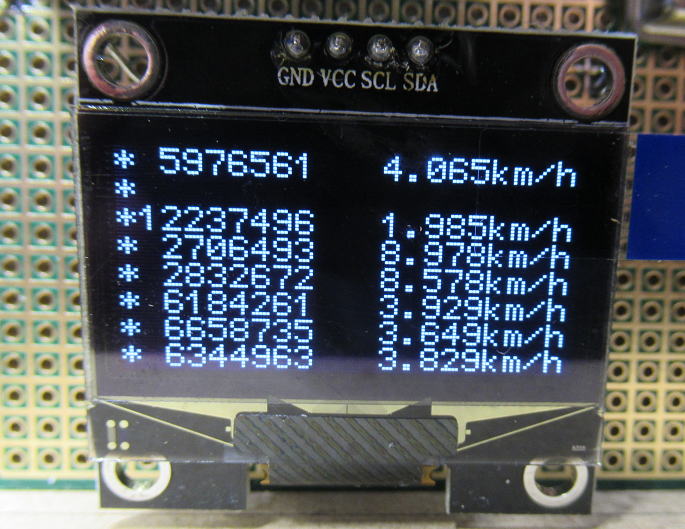
ソフトは極めて簡単。左側数値はフォトトランジスタのON間のカウント値。右側は時速換算です。
初速測定してみましょう 2023.11.28
速度計を射出機出口に設置して測定です。
バラつきもでるので、それぞれの回転数でボールを4、5個飛ばします。
なお、直接ロータの回転数を測定するようにはしていなかったので、
回転数制御のポテンショ電圧のみ測定です。回転数への変換は、少々誤差がのってしまいますが、
変換テーブルを用いて換算です。

速度計を射出直後に設置して計測です.
測定中です。
測定結果から、ポテンショ出力と初速の関係をプロットしました。これが生データです。
ポテンショ出力はモータのPWM制御のDUTYに比例した値になっています。
下のグラフからほぼDUTYに比例してボールの初速が上がっていって、
最高65km/hまで達しています。ただし、ポテンショ電圧が3.8V以上では速度は飽和気味、
というか若干下降気味です。高速なロータ回転数ではボールとのスリップが激しくなって、
うまく動力が伝わっていないのでしょう。もうすこし、ローラの間隔を狭めたほうがいいのかもしれません。
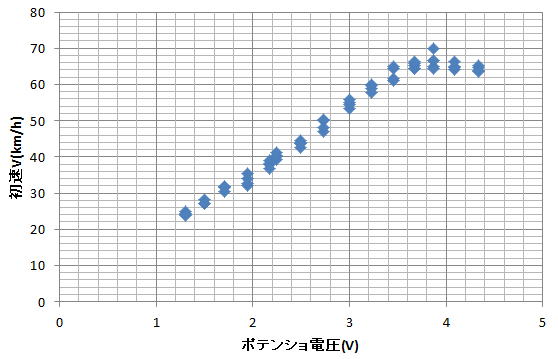
まずはポテンショ電圧と初速の関係です。3.8Vまではほぼ比例していますが、それ以降は飽和(漸減)気味です。
上の図から、変換テーブルをつかってロータの回転数に横軸を変換です。
これから、ロータの回転数が6500rpmで初速が最大になるような感じです。
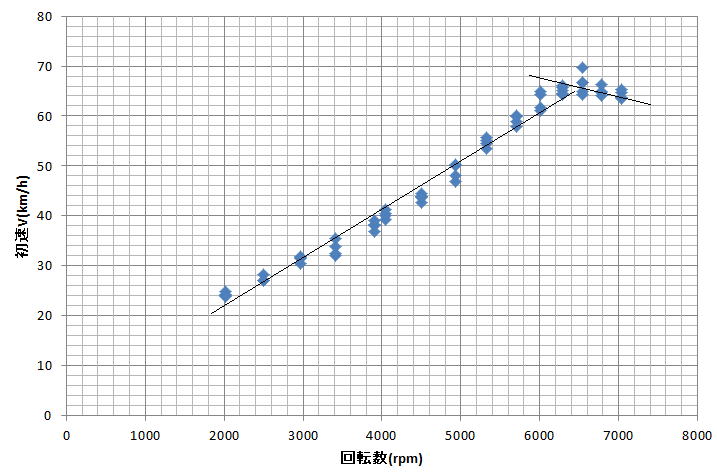
ロータの回転数は6500romで初速が最大になるようです。あまり、ロータの回転数を上げても意味がないことがわかりました。
なお、ロータの周速と初速の関係をプロットしたのが下図です。
およそロータ周速の1/2程度が初速になっているようです。
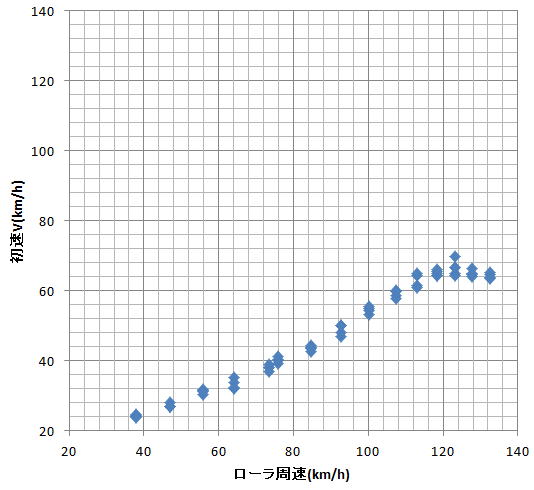
ロータ周速とボール初速の関係です。
下はローラ周速と初速への影響比の関係です。ローラ回転数が低いところでは、比率が大きくなり、
回転数が高いところでは比率が小さくなります。
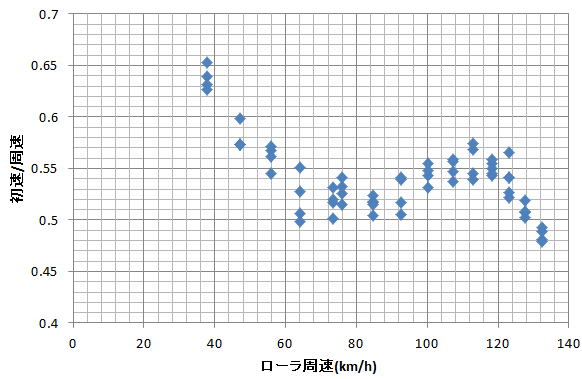
ローラ周速と初速への影響比の関係です。
初速計測まとめ
今回初速を計測して以下のことがわかりました。
1. 現行ではロータ回転数6500rpm時に初速65km/hが最大となる。
2. 回転数が6500rpm以下では概ね回転数と初速は比例する。
3. 回転数を6500rpm以上に上げても初速は向上せず、むしろ漸減する(スリップが大きくなる様子)。
初速をもっと上げるには、ローラ間隔をさらに狭くすることが有効と思われる。
まあ、1号機はこんなものでしょう。
(とりあえず、こんなところで終了しましょう)
改造記事に続きます!